昨日計算した部品代ですが、大事な部品(ボールベアリング)が抜けていました。それで、修正です
総額 = \34,300
(内訳)
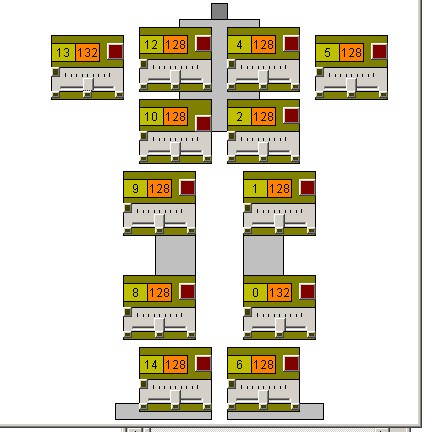
サーボ S3003 1,800 x 12 = 21,600
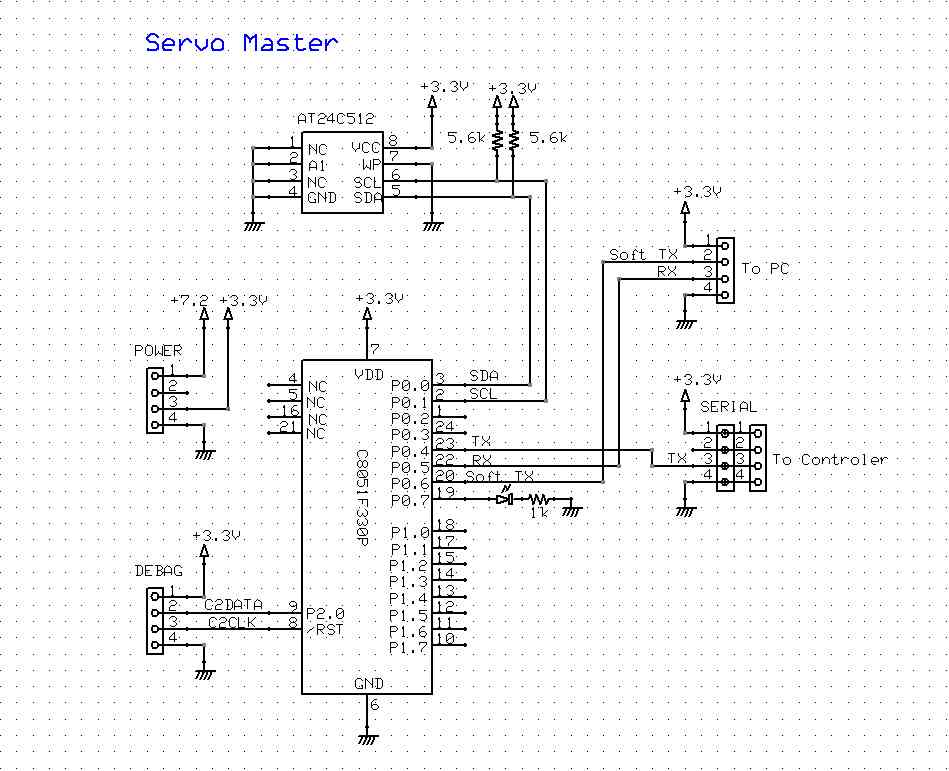
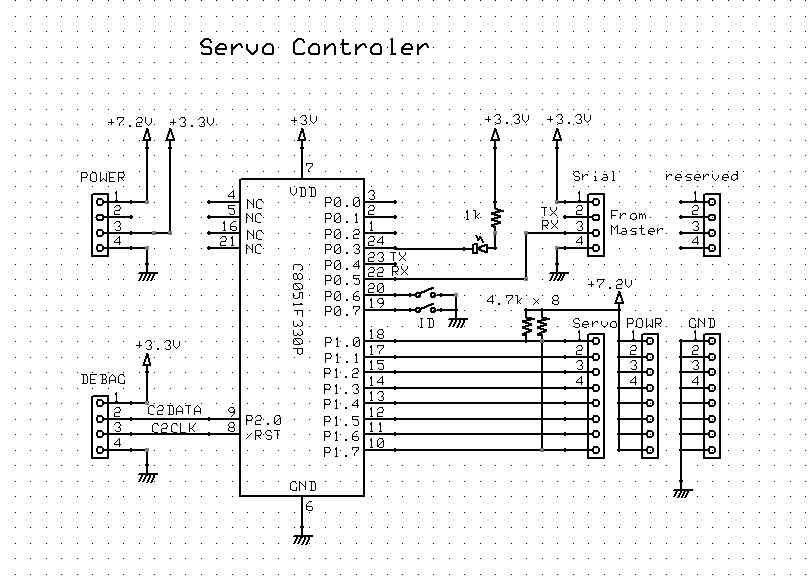
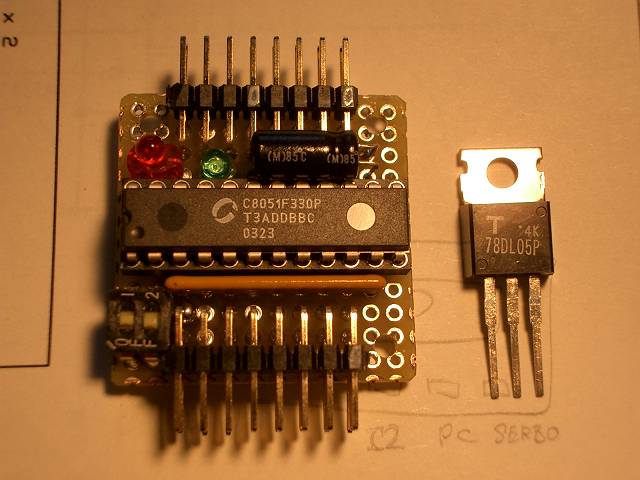
CPU C8051F330P 900 x 3 = 2,700
アルミ1.0t,ネジなど = 800
基板、コネクタ = 400
R,C,3端子,LEDなど = 300
木材 = 200
6V ACアダプター = 800
シリアルEEPROM 24C512 = 400
その他 = 500
バッテリー = 0 (不要品再利用)
ボールベアリング 1,000(4個セット)x3 = 3,000
|
|
|