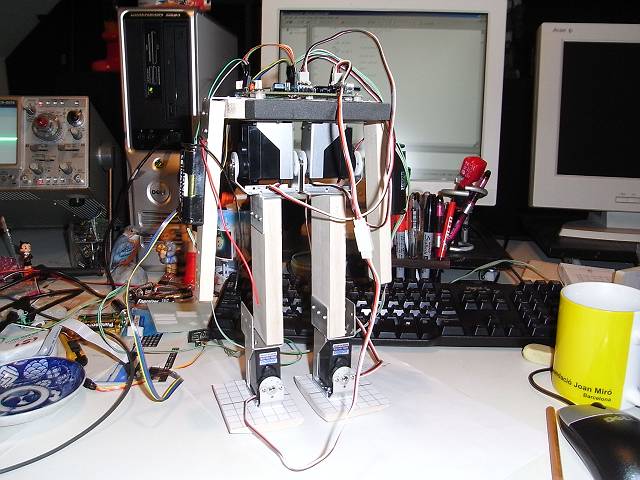
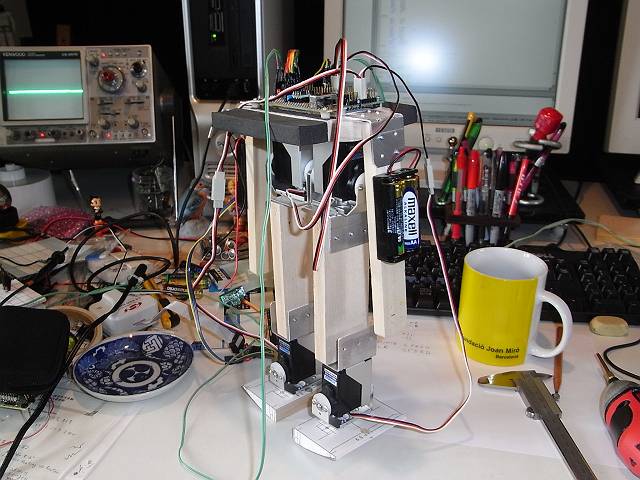
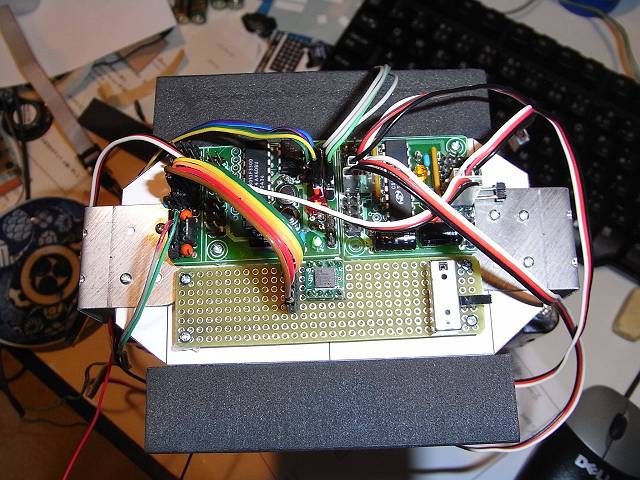
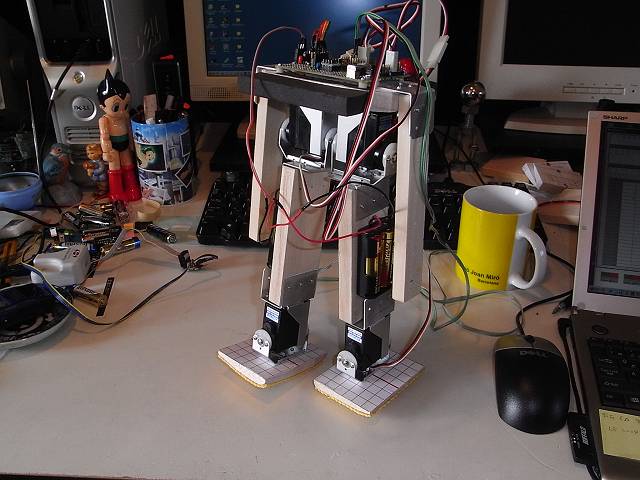
あまり深い理由はないのですが、電池BOXを足に移し、電池で動くようにしました。
自立歩行が出来るようになりました。
まだまだヨチヨチ歩きです。
歩行のスピードは遅いですが、結構安定した歩行になってきました。
畳、カーペット、キッチンマットの上など、歩行を試してみました。
テーブルクロスの上の歩行動画
テーブルクロスの上の花瓶敷を横断の歩行動画
畳の上の歩行動画
カーペットの上の歩行動画
キッチンマットの上の歩行動画
<私的メモ、歩行パラメーター>
PM_0, #128+0 ;静止 ID0
PM_1, #128-0 ;静止 ID1
PM_2, #128+22 ;左右 ID1
PM_3, #128-22 ;左右 ID0
PM_4, #30 ;SPEED HOME
PM_5, #30 ;SPEED LR
PM_6, #127+3 ;前後ID2,3
PM_7, #50 ;SPEED
LEVEL0, #4 ;AREA3 Threshold
LEVEL1, #18 ;AREA4 Threshold
|
|
|