2足歩行を基本から勉強開始です。
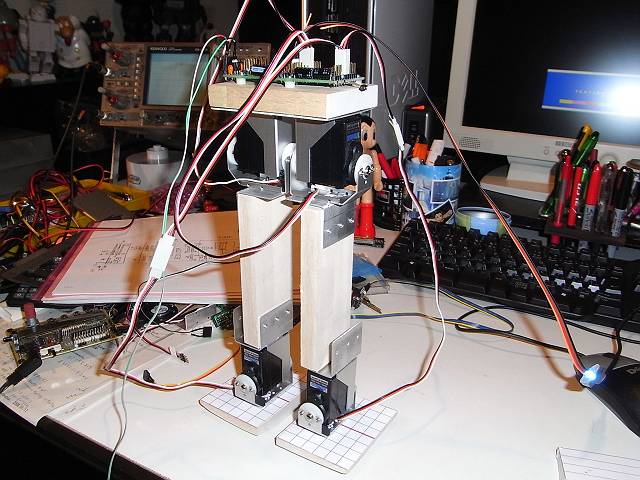
無性にサーボモーターをコントロールしたくなって、2足歩行実験用のハードを作りました。
今回の歩行方法は伝助振子歩行の発展形です。
左右に体重移動しながら足を前後に動かす動歩行です。
足裏が球面状になっています。
左右の体重移動はできそうですが、歩行になるか未知数です。
サーボは4つ使っています。
姿勢のフィードバック無しだと左右の体重移動が安定しません。
姿勢のフィードバックを足裏SWにするか、加速度センサーにするか、検討が必要です。
フィードバック無しの体重移動動画
|

|
|