「2モーターひざブラブラ歩行」を考えてみました。
人が2足歩行するとき、体重がかかっている軸足と反対側の足のひざはブラブラしている、ようなので、同じような歩行ができたら楽しそうです。
それで、2モーターでこの歩行が実現できないかチャレンジです。
足は木材を使い、ひざは蝶番でブラブラさせます。
蝶番の取り付け位置は、後ろよりにします。
足を伸ばした状態で自立しているときは、足が突っ張った状態になることを期待しています。
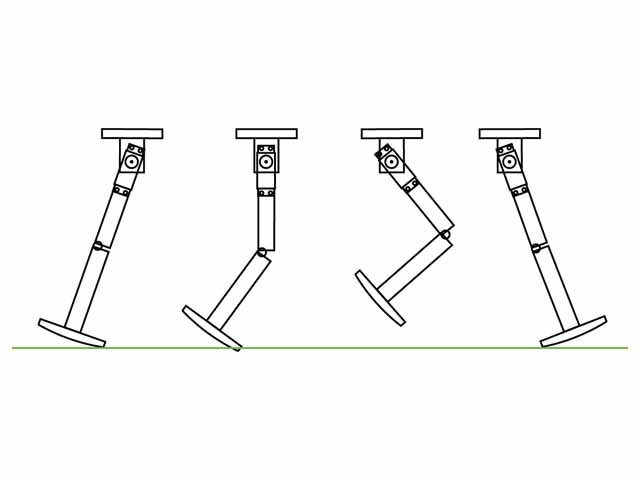
歩行のとき軸足と反対側の足の付け根サーボは高速で回転します。
すると、ひざが折れて足下が遅れて回転してきます。(ここは希望)
サーボの回転を急に止めると、足下部は慣性力で回転するので、足が直線になるまで回転します。
それで、この足が突っ張って軸足になります。
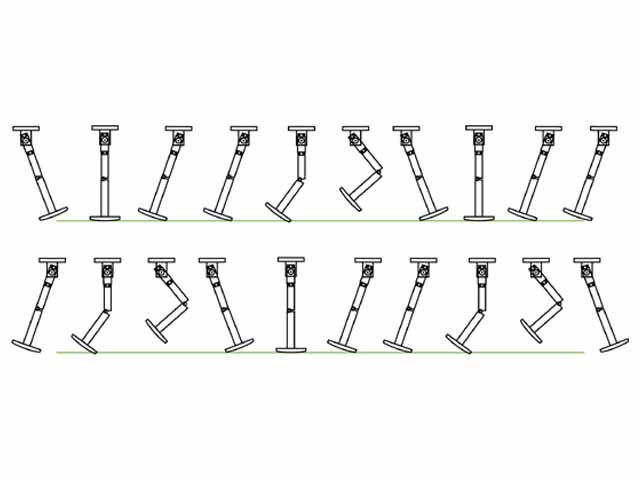
これを左右交互に動かすと「ひざブラブラ歩行」が完成です。
実際には、左右の体重移動が必要だと思います。
それから、足裏は曲面になっています。
半径は足の長さです。
はたして、うまくゆくでしょうか。
|
|
|