i-SOBOTサーボ解析第2弾です。
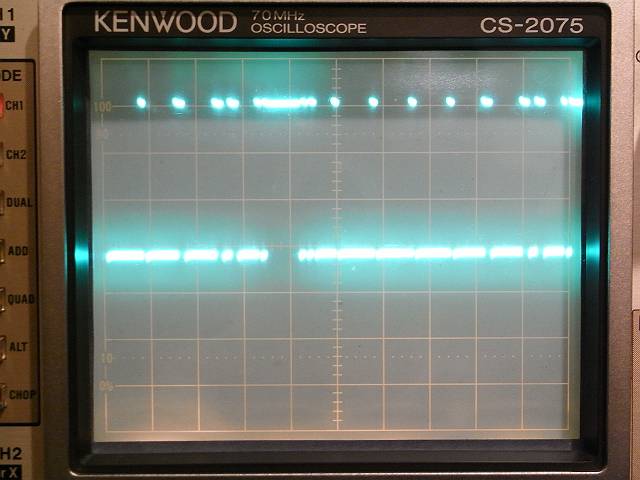
制御はシリアルらしいということで、まず普通のシリアルであると仮説を立てました。
オシロで1ビットの幅を計ったら、約0.42msでした。
これからボーレート計算すると、2400bpsとなりました。
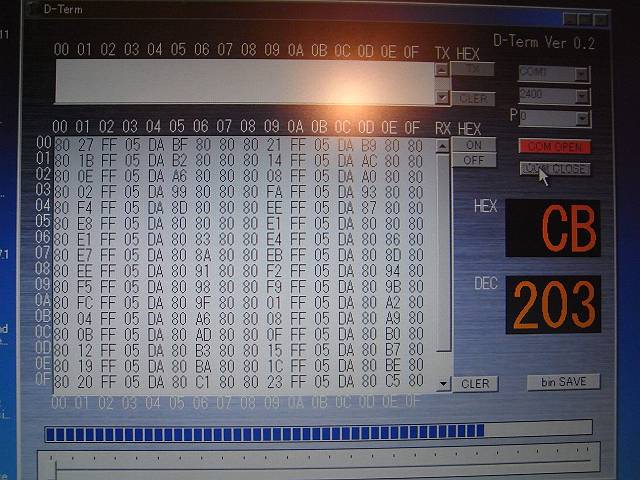
早速、D-TERM(自作シリアルチェックソフト)へ繋ぎ、2400bpsでデーターを受信してみました。
何かそれらしいデーターが受信できました。
[勝手な推測]
2400bps, 1+8+1のシリアル
1フレーム8byte構成。
1byte目 FFh 多分スタートByte(伝助の通信プロトコルと同じ)
2byte目 05h 多分コマンドか?(35h, 3Ahの時もある)
3byte目 不明、サーボ角度か???
4byte目 不明、サーボ角度か???
5byte目 不明、サーボ角度か???
6byte目 不明、サーボ角度か???
7byte目 不明、サーボ角度か???
8byte目 不明、サーボ角度か???
|

|
|