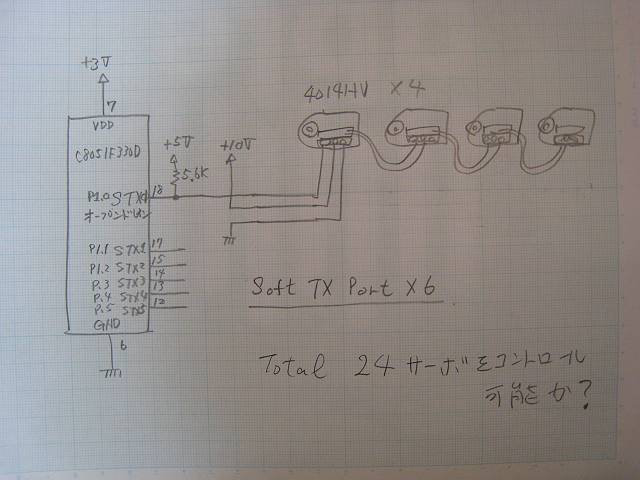
4014HVをソフトウェアシリアルで動かすことができました。
TXのみの実験です。
8.68μs(115200bpsの1クロック分)周期でタイマー割り込みを発生させて、1ビットづつ送信します。
PUSH POPなど基本割り込み処理で約1.2μsかかってました。
1個のソフトTX処理で約1.3μsかかってます。
パリティーの処理時間は、あまり気にしなくて良かったです。
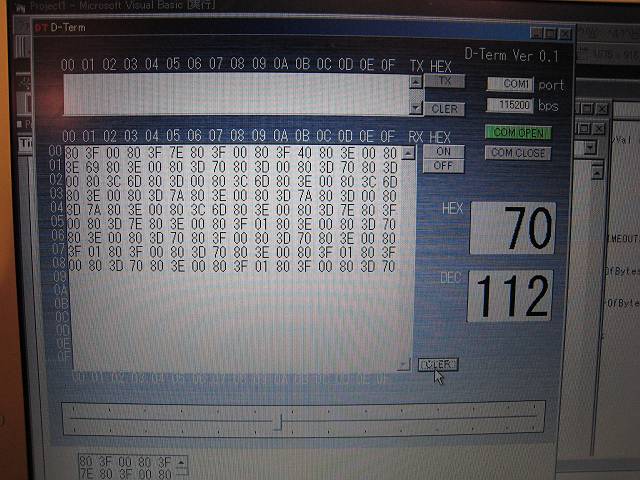
まず、自作ターミナルソフトできちんとDATAが送信されていることを確認。
とりあえず思いとおりのDATAが送信されていたので、ほっとしました。
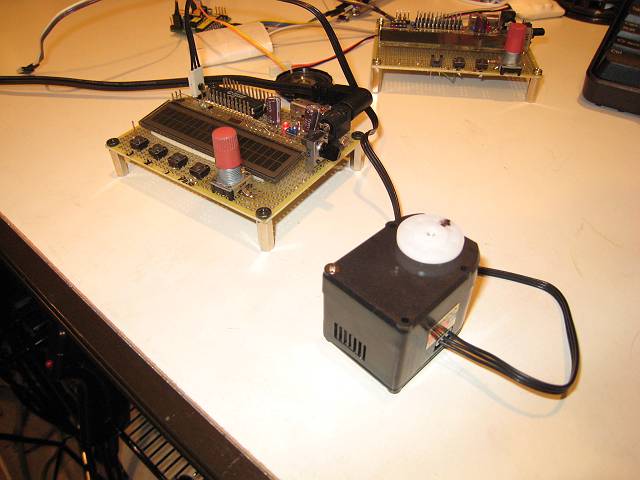
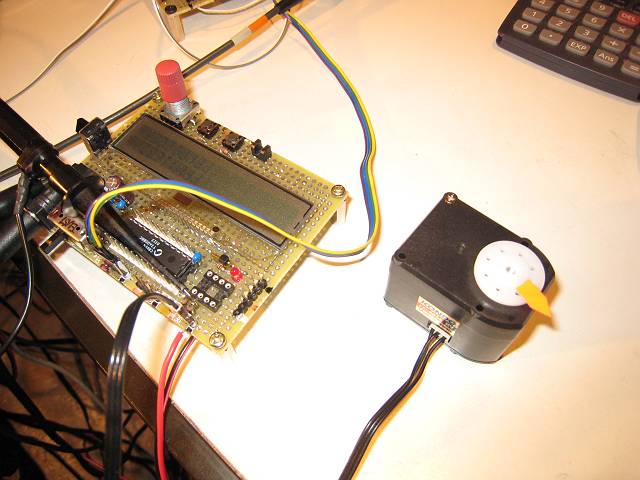
さて、いよいよ4014の制御です。
電源電圧は10Vです。
ポジションコマンドの3バイトを送って、ポジションが変わるのが確認できました。
やれやれです。
ためしに、スピードのパラメーターを変えてみました。
おー、スピードも変わる。
スピード1は、かなり遅いです。
で、ここでおかしな症状を確認。
スピードを遅くすると目立つのですが、
時計回りと、逆時計回りで動きが違います。
時計回りはスムーズなのですが、
逆時計回りだと、スピードが速く、ぎこちない感じです。
原因は不明です。
4014スピード127(高速)動画
4014スピード40(低速)の動画
■私的メモ
;=======================================
; Timer0 割込み Software UART用
;=======================================
;**** SOFTWAER UART ********************
int_TM0:
SETB TEST_P ;TEST
PUSH PSW
PUSH ACC
PUSH DPH
PUSH DPL
CLR TF0
;***STX0********
JNB STX0_F, ST0R
INC STXBCNT0
MOV A, STXBCNT0
CJNE A, #1, ST01
CLR STX0_P ;START BIT = 0
MOV STXPCNT0, #0 ;PARTY CNT =0
JMP ST0R
ST01:
CJNE A, #10, ST02
MOV A, STXPCNT0
RRC A
MOV STX0_P, C ;PARITY BIT
JMP ST0R
ST02:
CJNE A, #11, ST03
SETB STX0_P ;STOP BIT = 1
CLR STX0_F
MOV STXBCNT0, #0
JMP ST0R
ST03:
MOV A, STXBUF0
RRC A
MOV STX0_P, C ;STX PORT
MOV STXBUF0, A
CLR A
ADDC A, STXPCNT0 ;PARTY BIT CNT
MOV STXPCNT0, A
ST0R:
;***STX1***
ST_RT:
POP DPL
POP DPH
POP ACC
POP PSW
CLR TEST_P ;TEST
RETI
|
|
|