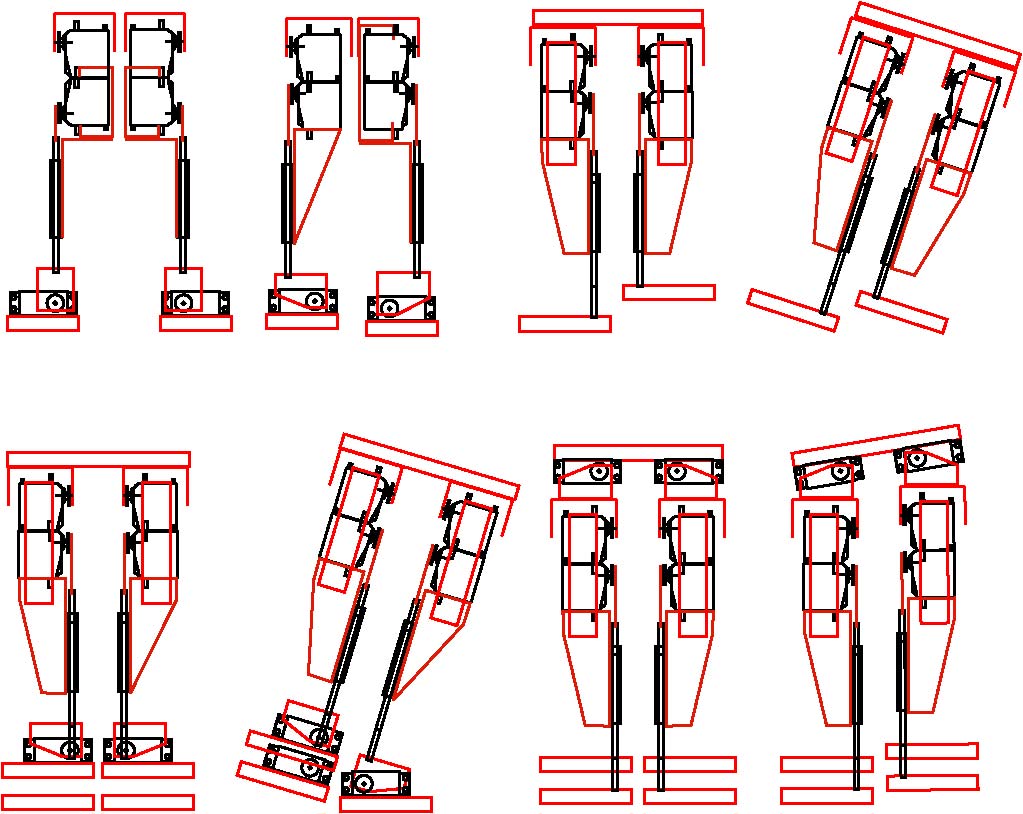
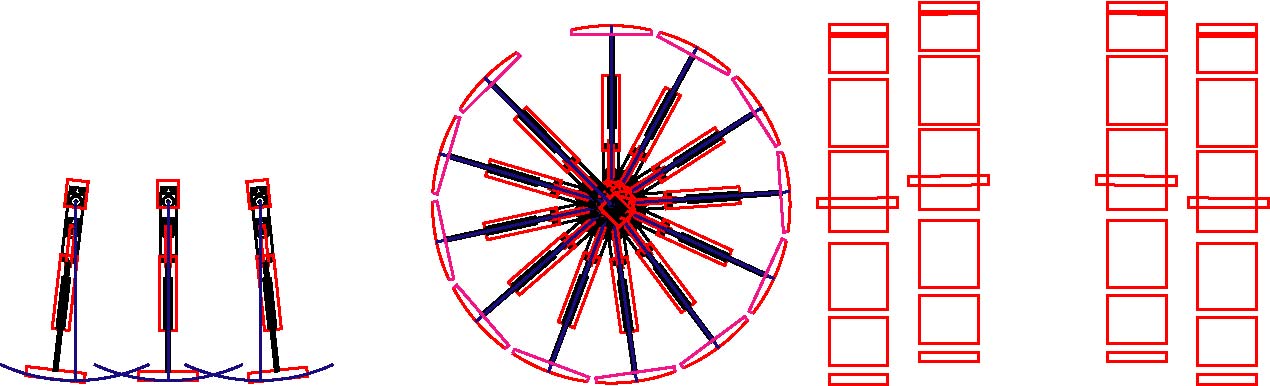
伸び縮みする足の実験をしてみました。
足パーツをきちんと作ろうかと思いましたが、時間もないので手抜きの工作で実験です。
サーボの180°回転で、足が35mm伸び縮みすます。
まず、この機構を使った足で、スプリングのアシストをしても、ジャンプは難しそうです。
S3003サーボではスピードとトルクがまったく足りません。
結構な重量です。 この機構で85gです。
S3003サーボ単体で35gでした。
ジャンプを考えず、歩行用としては使えるかもしれませんが、この機構にこだわる必要があるのか疑問です。
メカっぽいところは気に入っているのですが、このままお蔵入りの可能性が大です。
伸び縮みする足の実験動画
|


|
|