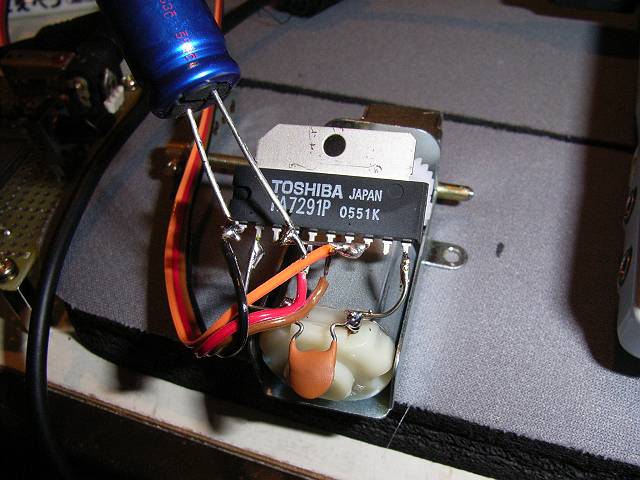
TA7291Pが熱くなった訳が解りました。
私の制御方法が悪かったようです。
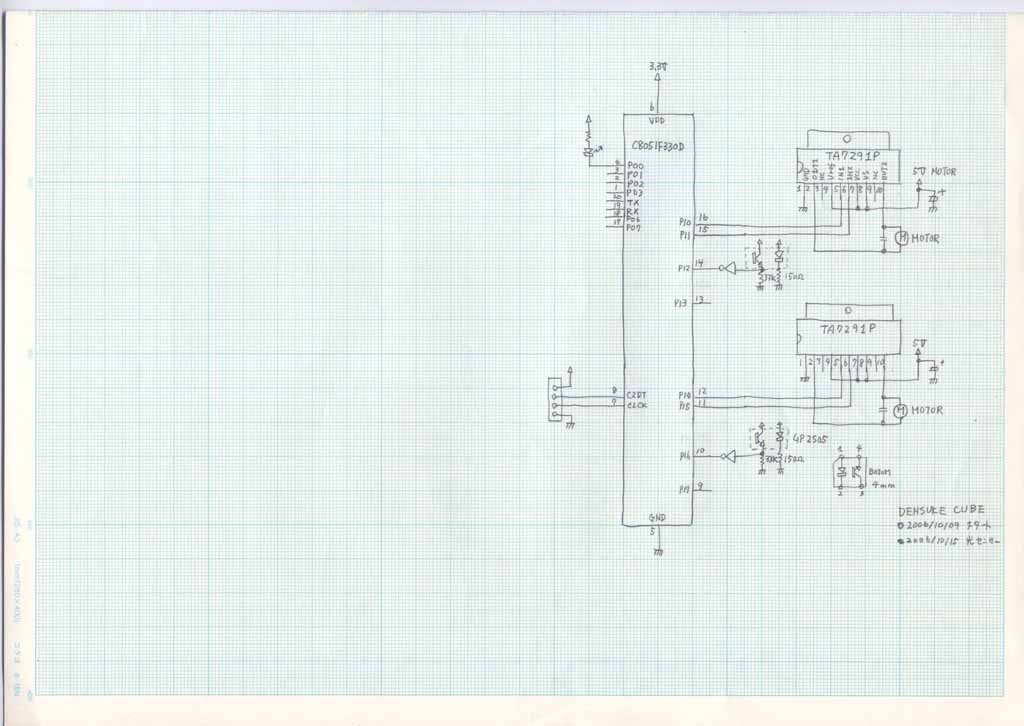
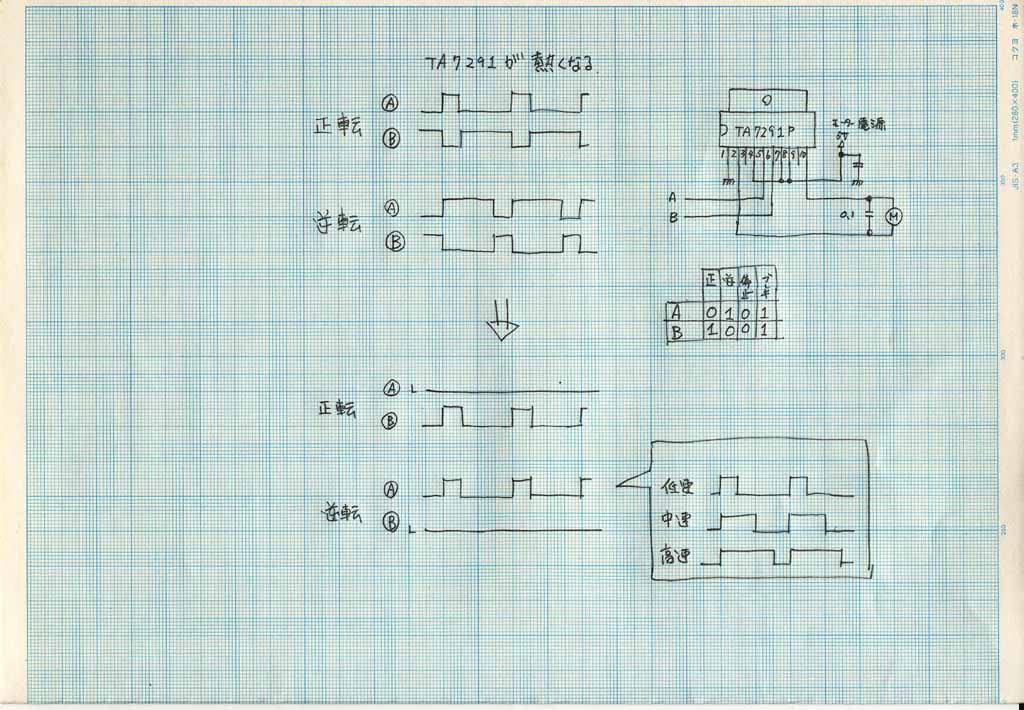
TA7291Pには制御端子[A],[B]と2つあるのですが、昨日やった方法は、[A]端子に入力したPWMの反転を[B]端子に入力していました。
PWM50%で[A]と[B]のバランスかとれて、モーターは静止、PWMを変化させると正回転、逆回転、スピードコントロールと可能なのでが、常にTrがON状態になり、静止状態の時も、電流が流れていました。
それで、制御方法を変えて見ました。
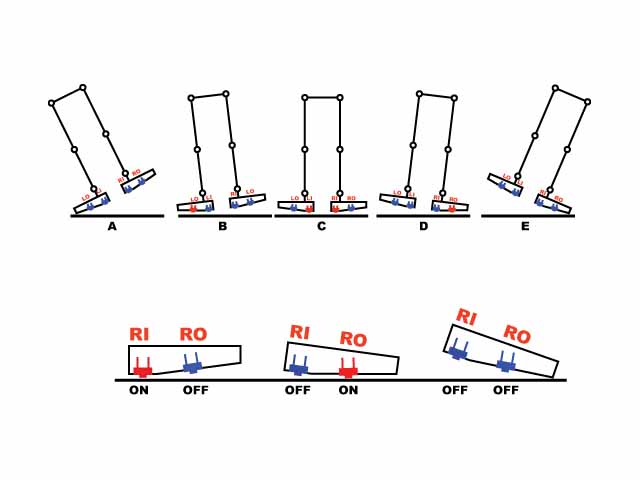
正回転の時は、[A]を0V固定で[B]のPWMを変化させてスピードコントロールする。
逆回転の時は、[B]を0V固定で[A]のPWMを変化させてスピードコントロールする。
このようにすることで、TA7291Pの発熱がかなり抑えられました。
この使い方が普通なのでしょうね。
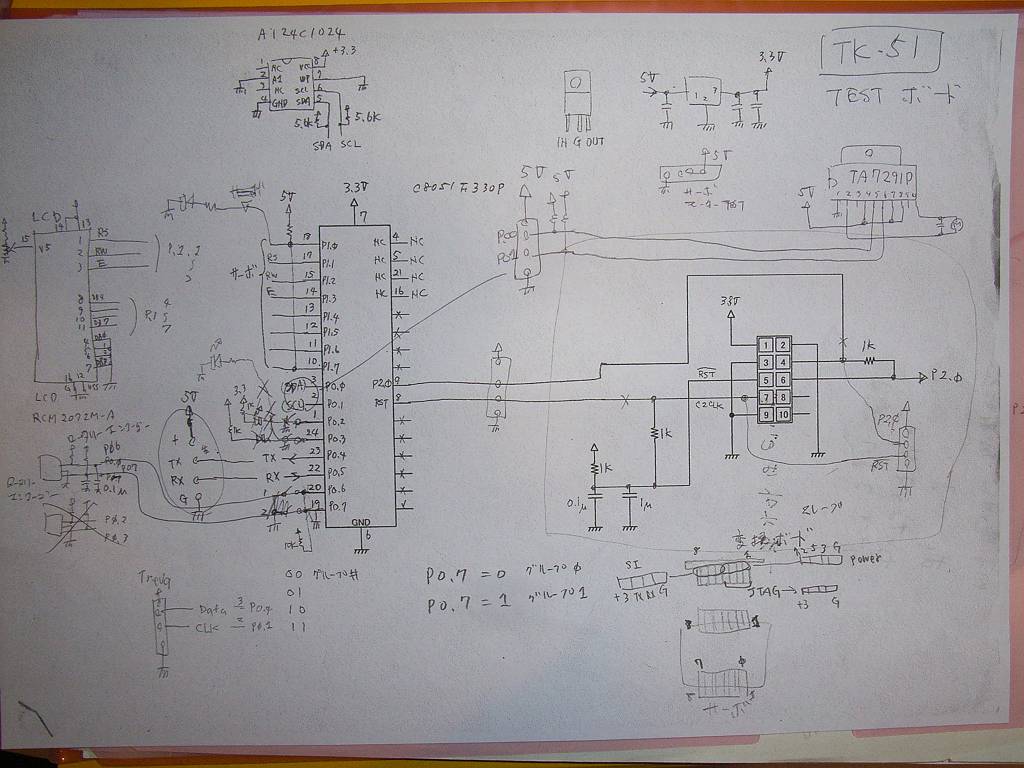
TA7291PのPDF
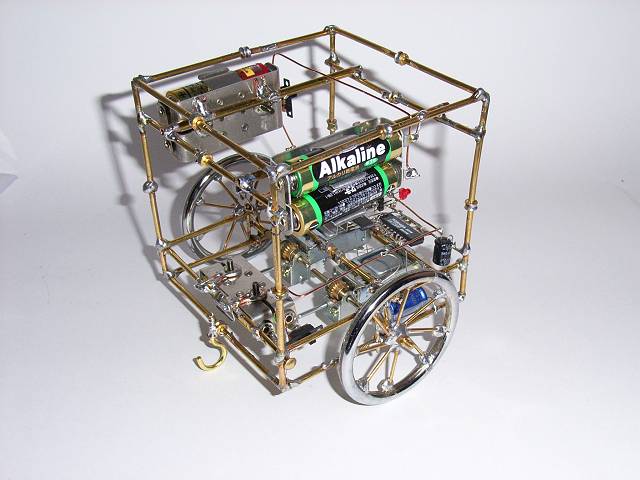
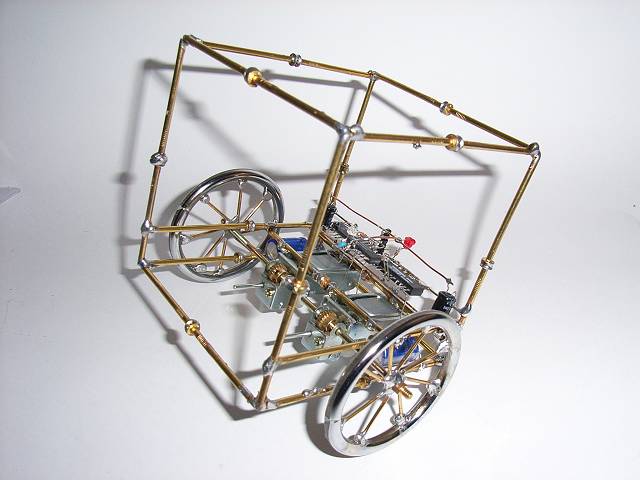
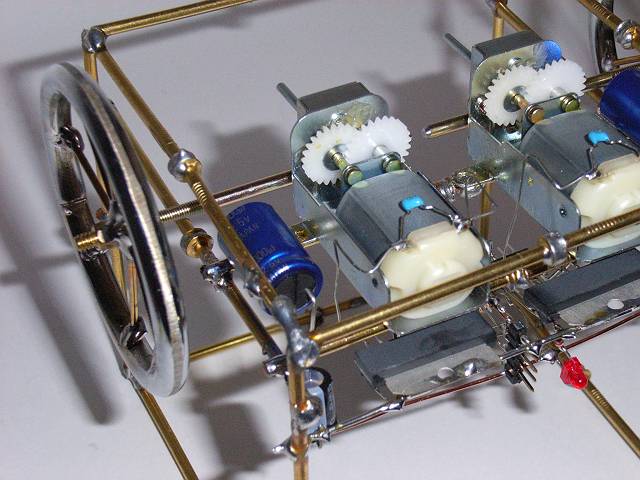
モーター制御の動画です。
|
|
|