久々にDigiKeyへ部品を発注しました。
型番とか不明だったので、カタログで探しながら注文しました。
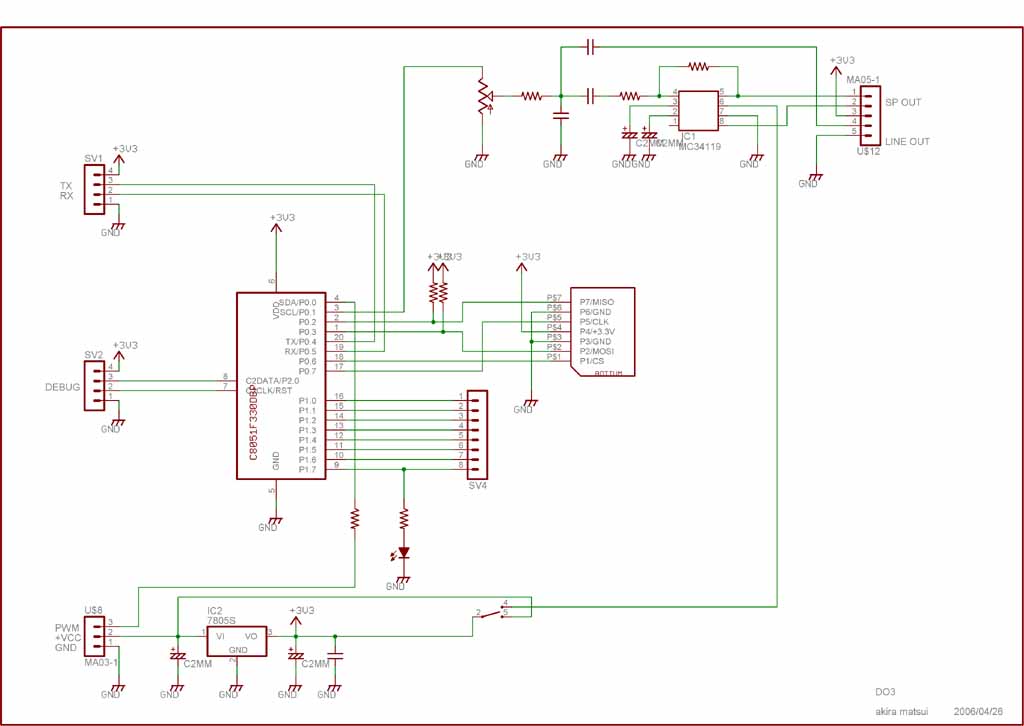
・JRCオーディオアンプIC
NJM2113D-ND IC AUDIO POWER AMP LOW-VOLT 8DIP
・松下1kΩ半固定
D4AA13-ND TRIMPOT 1K CARBON LAYDOWN (102)
・ヒロセminiSDソケット
HR847CT-ND CONN MEMORY MINI SD TOP MT SMD
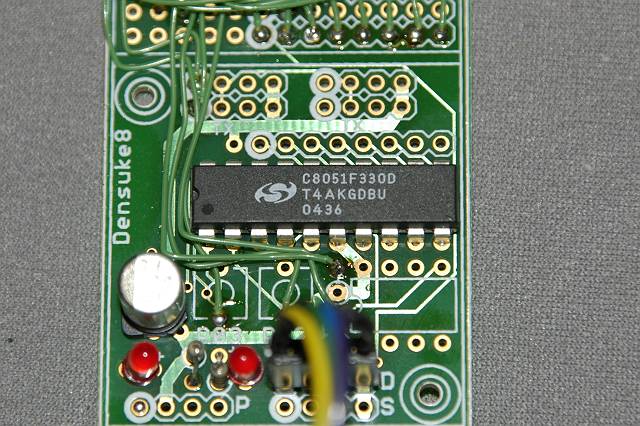
・CPU C8051F330-GP(F330DのRoHS対応置換え版)
336-1263-ND IC 8051 MCU 8K FLASH 20DIP
UPSで送料2,000円だそうです。
さて、何日で届くでしょうか。
|
|
|