伝助日記
2006年4月の日記
2006年4月30日(日)
New伝助3号ハード完成
足の作り直し
2006年4月29日(土)
New伝助3号腰回転軸追加
早起きして工作開始
2006年4月28日(金)
S3003サーボの反対軸
2006年4月27日(木)
プリンターラベル用紙大量..
2006年4月26日(水)
DO3(伝助音声ユニット3)..
2006年4月25日(火)
S3003入手
2006年4月24日(月)
動的体重移動
2006年4月23日(日)
New伝助3号動き出す、が..
2006年4月22日(土)
New伝助3号の組立て
2006年4月21日(金)
工作の準備
2006年4月18日(火)
週間マイロボット解約
2006年4月16日(日)
足の仮組み
2006年4月15日(土)
作業進まず
2006年4月14日(金)
NEW伝助3号のサーボはS03..
2006年4月13日(木)
NEW伝助3号
2006年4月12日(水)
足首サーボの配置
2006年4月11日(火)
伝助8号新サーボレイアウ..
2006年4月10日(月)
Table作成Tool
2006年4月9日(日)
伝助8号改造計画
2006年4月8日(土)
倒立振子、少しだけ立つ
鉄のオブジェ
2006年4月5日(水)
ロボワン・ワールドカップ..
2006年4月4日(火)
倒立振子立たず
2006年4月3日(月)
倒立振子のタイヤを大きく
2006年4月2日(日)
なかなか立たない倒立振子
DO2里帰り
デジタルマルチテスター
2006年4月1日(土)
倒立振子ハード完成
2006年4月30日(日)
New伝助3号ハード完成
No.436
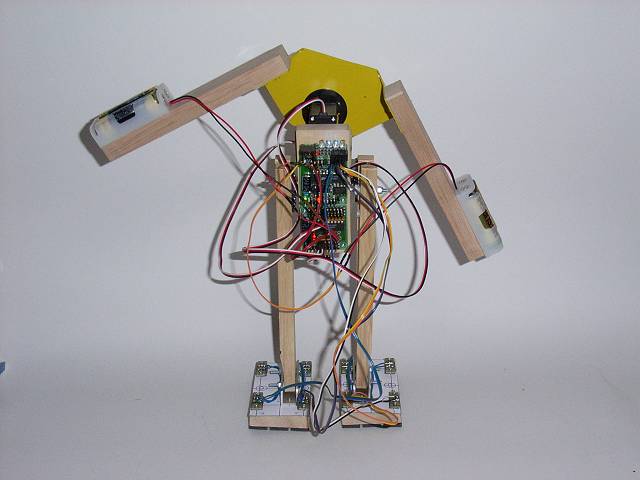
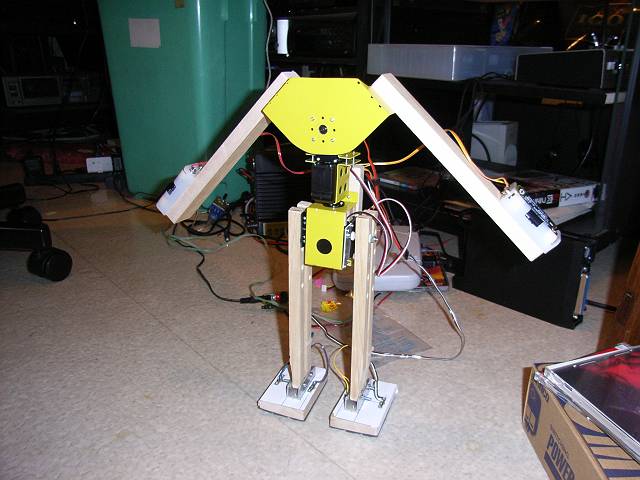
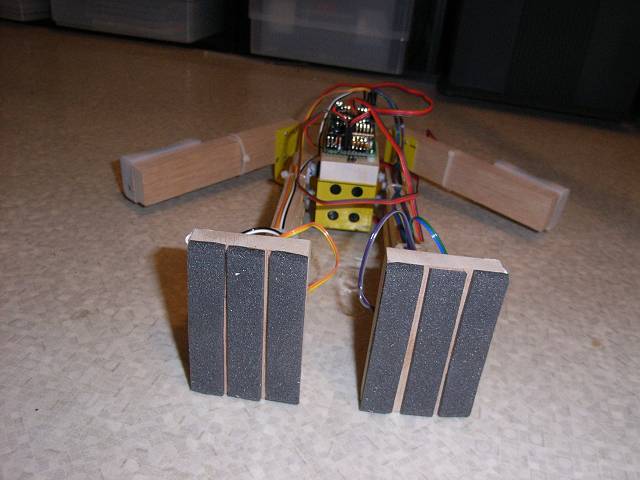
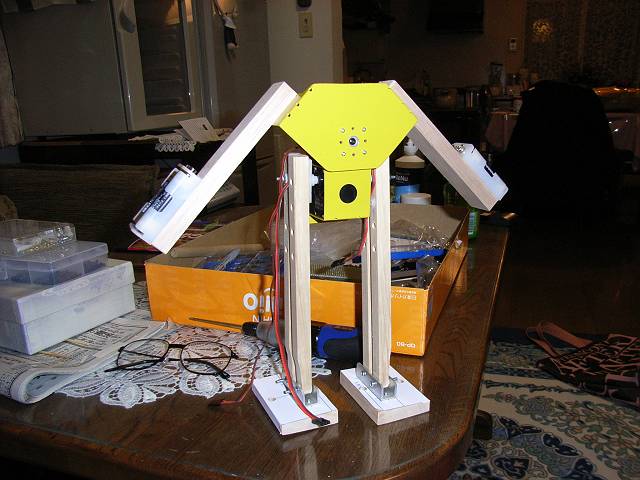
New伝助3号のハードがほぼ完成しました。
結局腰の回転軸はやめました。
理由は、ちょっとスタイルが悪くなったような気がしたためです。
結局サーボ3個のシンプルな構成になりました。
足裏SWは合計8個、足裏の4すみに4個づつ使っています。
ただし、CPUのポートが少ないため、右足外側、内側、左足内側、外側の4種類の変化しかセンスできません。
超単純なアルゴリズムで、何とか歩行が出来るようになりました。
アルゴリズムは、
右外側SWON(右足に重心あり)で、腕を左回転、左足前、右足後へ動かす。
左外側SWON(左足に重心あり)で、腕を右回転、左足後、右足前へ動かす。
この繰り返しです。
次の課題は、「旋回」と「高速歩行」です。
まだまだ先は長そうです。
New伝助3号、単純歩行の動画。
2006年4月30日(日)
足の作り直し
No.435
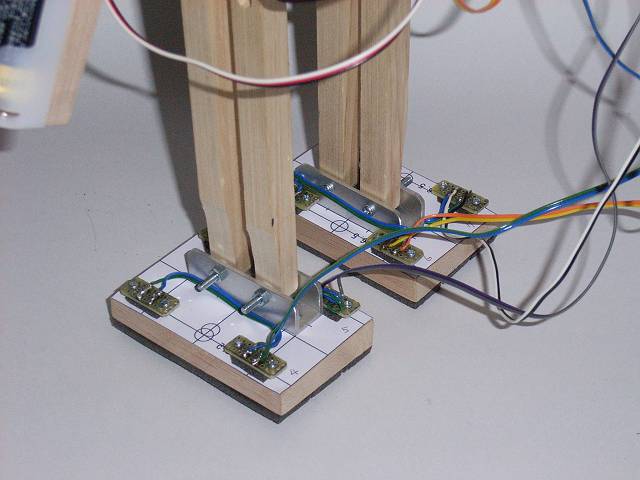
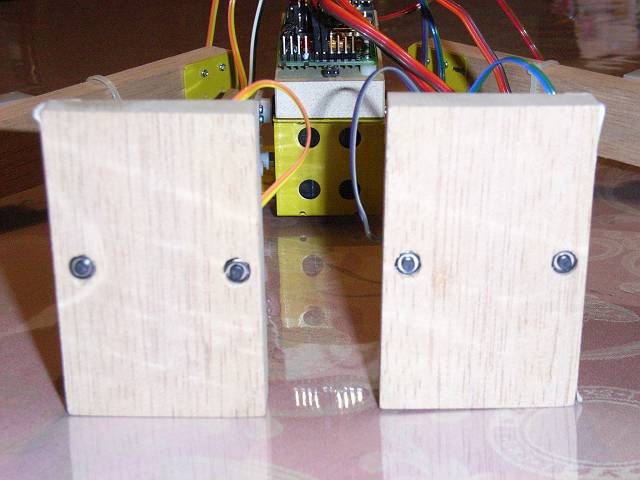
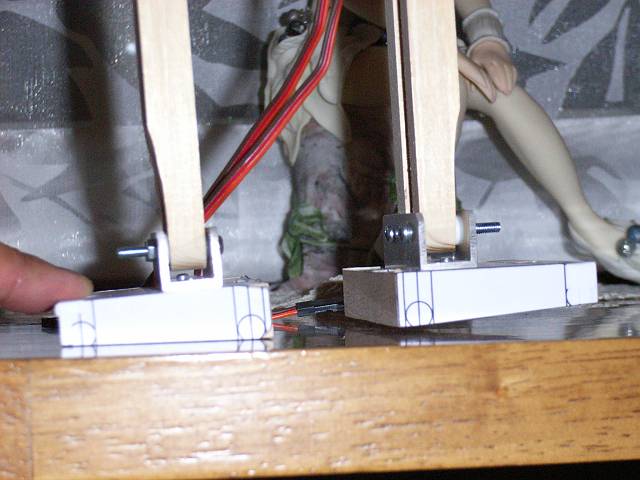
足裏のSWですが、片側2個から4個にしました。
それと、SWの足裏からの出っ張りを調整できるようにしました。
木ネジの締め付け方で、調整できます。
昨日組んだ機体は分解です。
左右の足の長さが微妙に違います。
足の取り付け穴の制度か、サーボの反対軸の精度か、結構気になっています。
2006年4月29日(土)
New伝助3号腰回転軸追加
No.434
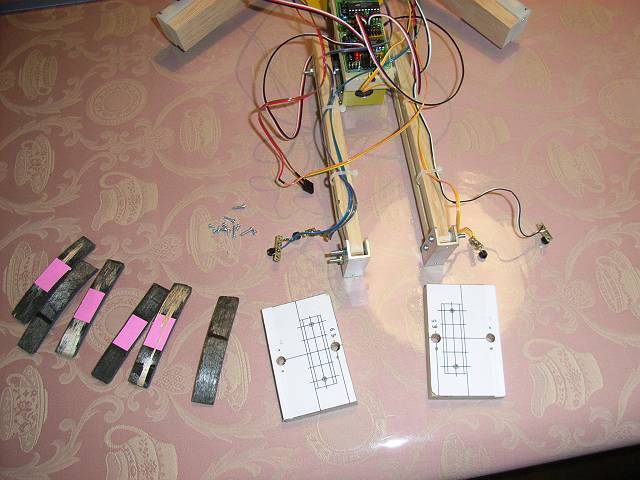
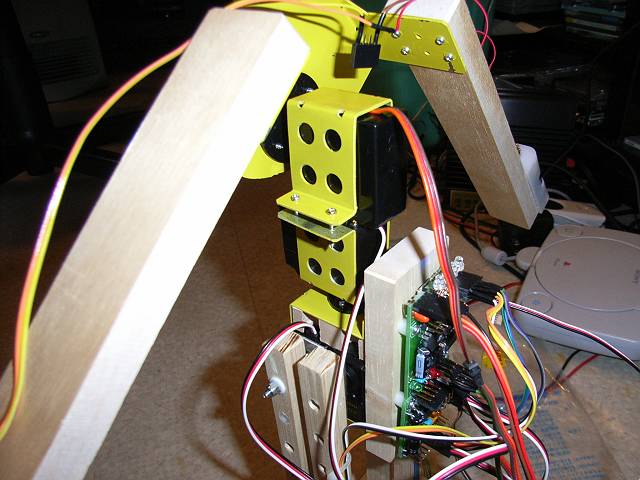
New伝助3号のサーボをS3003に交換しました。
ついでに腰の回転軸を追加しました。
サーボ取り付け用のアルミフレームも作り直しました。
平行リンクの足は、足の長さの調整がむずかしいです。
初め、左右の足裏の水平微妙にずれていて、足踏み(左右体重移動)が全く出来ませんでした。
ワッシャをスペーサー代わりに使って、微調整を試み、何とか動く様になりました。
まだヨチヨチ歩きですが、なんとなく様子がわかってきました。
まず、サーボ2個でも歩行が出来る可能性が見えてきました。
1個のサーボ(腕)で腕をふり、左右に体重移動、もう一つのサーボ(腰の回転)で体をひねりながら足を交互に前に出してゆきます。
危なっかしい歩行ですが、少しは前に進みます。
腕の振りと腰のひねりを使った歩行実験の動画。
3つのサーボを使った「伝助振子歩行」も歩幅が小さいですが何とか動き出しました。
まずは、小さな第一歩です。
伝助振子歩行実験の動画(まだまだです)。
2006年4月29日(土)
早起きして工作開始
No.433
昨日ひび割れした木の足は、木工用ボンド+万力で何とかそのまま使えそうです。
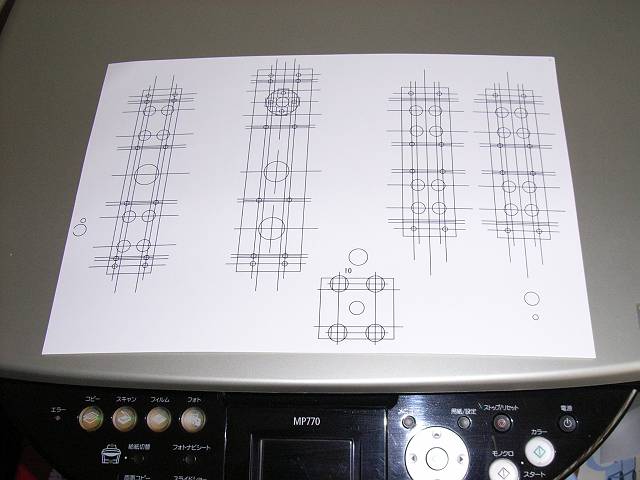
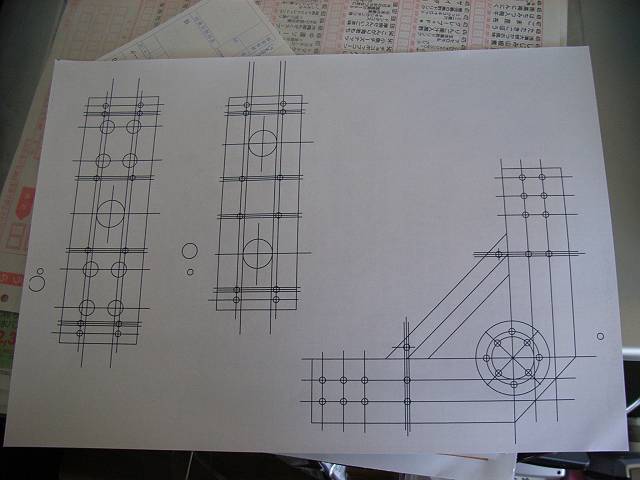
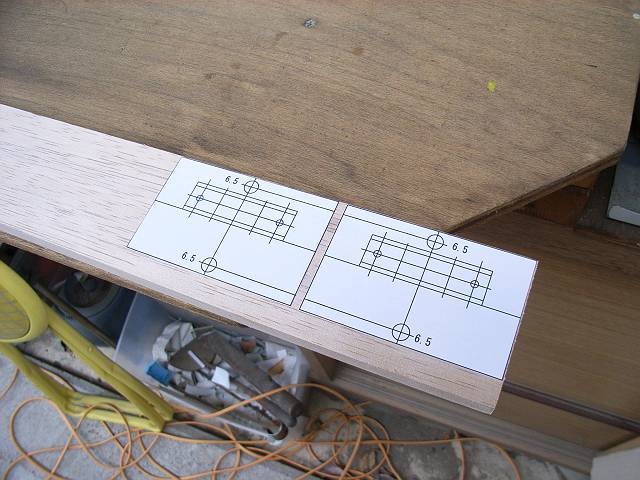
早起きして工作の開始です。
S3003にサーボを変更するので、取り付け用アルミフレームの図面を書きました。
この前大量に買った、ラベルシートに印刷です。
今日は伝助シリーズで初の試みを実験してみます。
腰のヨー軸を追加してみます。
腰の回転を加えることで、歩行が安定するのではないか、と思ったからです。
さて、どのような結果になるか楽しみです。
2006年4月28日(金)
S3003サーボの反対軸
No.432
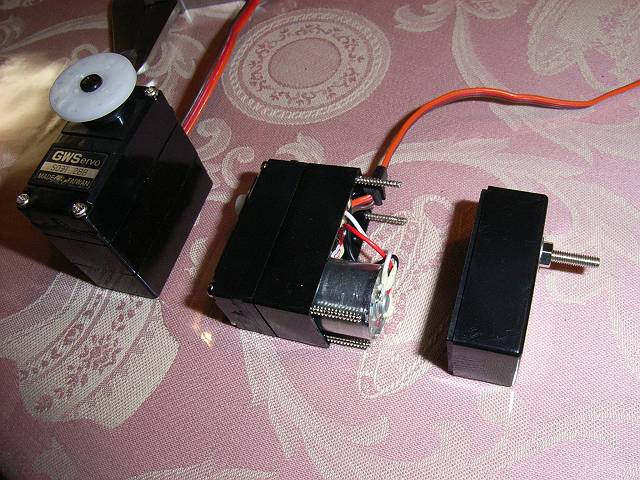
S3003サーボの反対軸を作りました。
伝助7号の時やった方法と同じです。
アルミに反対軸になる3mmのネジを取り付け、サーボケースのフタと共締めします。
サーボケースのフタには、ネジ頭の大きさの穴を開けておきます。
サーボケースのフタの内側には絶縁シートを入れておきます。
さて、サーボホーンですが、S03TとS3003と微妙に大きさが異なるようだったので、S3003のサーボホーンを加工して、足に取り付け直しました。
ここで、恐れていたことが起こりました。
サーボホーンは木ネジで木の足に取り付けしていますが、木ネジを締め付けたら木に亀裂が入ってしまいました。
これを作り直すのは結構大変なので、
とりあえず木工ボンドを充てんして万力で締め付けて
様子を見ることとしました。
2006年4月27日(木)
プリンターラベル用紙大量購入
No.431
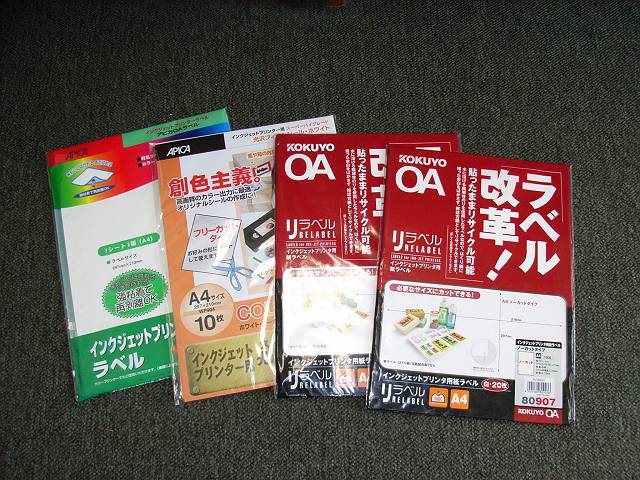
プリンターラベル用紙を大量に購入しました。
会社の帰りに、松本市の林友ホームタウンへ寄ったところ、閉店セールをやっていました。
閉店完売セール、店内の商品全品店頭表示価格の40%OFFでした。
商品はあまり残っていませんでしたが、店内をぐるっと見て歩いたところ、プリンターラベル用紙が目に留まりました。
アルミや木の加工をするときいつも使っています。
通常価格だと結構高いので、大量に買い占めて来ました。
結構安く買えました。
2006年4月26日(水)
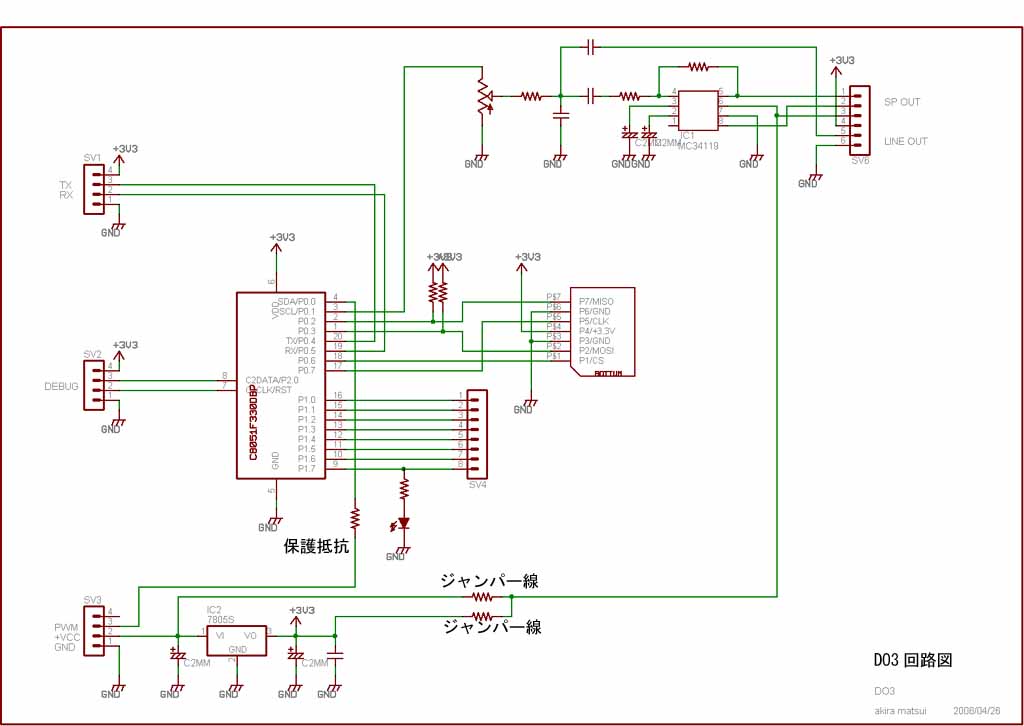
DO3(伝助音声ユニット3)回路図
No.430
DO3(伝助音声ユニット3)回路図を書いてみました。
DO3はDO2のちょっとした変更(改良)版です。
といいますか、ほとんど同じでなのですが。
主な変更点は、
1:オーディオアンプの電源ソースをジャンパー線で選択できるようにしました。
アンプの電源をPWMの電源からダイレクトに取れるようにしました。
16Vまで供給可能です。
当然、音量もそれなりにアップします。(するはずです)
DO2は、3端子レギュレーターの出力(3.3V)を使っていましたので、音量アップのご要望にお答えしました。
2:PWMの信号線とCPUのポート間に保護抵抗を入れました。
DO2が時々動かなくなる、との報告をいただいております。
原因は不明なのですが、一応保険をかけておきます。
3:電源LEDをやめて、CPUポートでLEDを点けます。
ポートで点けるLEDがあると、色々と便利です。
再生中に、LEDを点けるとか、エラーになったらLEDを点滅させるとか、アップデート終了したらLEDを点けるとか、PWMの幅に応じてLEDの点滅スピード変えるとか、いざというとき色々と便利です。
2006年4月25日(火)
S3003入手
No.429
S3003
を入手しました。
1つ1,300円です。
あと、寸法測定のためKRS-4014HVも一つ入手しました。
シリアルコントロールのコマンドがまだ公開されていないようなので、シリアルのコントロールの実験は出来ません。
2006年4月24日(月)
動的体重移動
No.428
動的体重移動という言葉が正しいかわかりませんが、動的体重移動が出来ました。
足裏にスポンジの隙間テープを貼ったら、結構いい感じになりました。
足裏の外側のSWの状態を監視して、ONになったら腕を振ってバランスをとります。
簡単なフィードバックですが、安定した体重移動が持続しました。
接地面と反対側の足裏も結構高く上がるようになり、期待がもてます。
現在、足の長さ200mm、足裏80x50mmです。
ちなみに、40%、25%です。
今日は、「これでサーボを交換して、足を前後に動かすと動歩行が完成」という夢でもみましょう。
足裏SWフィードバックによる動的体重移動の動画。
2006年4月23日(日)
New伝助3号動き出す、が・・・
No.427
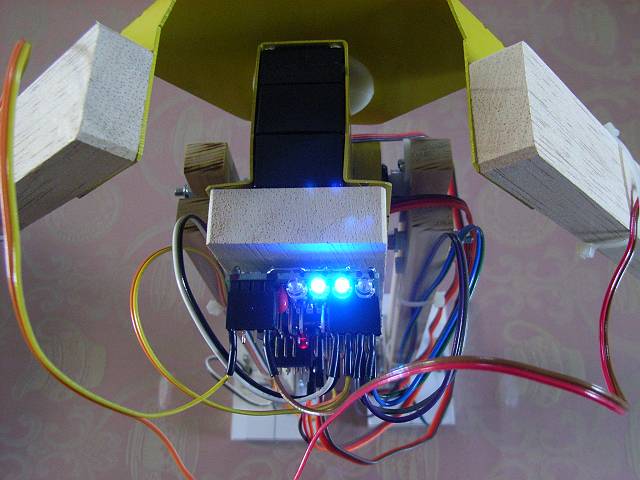
New伝助3号が動き出しました。
足裏に取り付けた4個のタクトSWも読み取りでき、そのまま4つのLEDをつけてみました。
左右体重の状態が一応把握出来ます。
腕を左右にパタパタ動かすと、左右の体重移動が始まります。
LEDを見ていると、LED点燈も左右に動きます。
さて、このタイミングをチェックして、左右足のピッチを前後に動かすと、前進や後退をする、はずだったのですが、問題が・・・。
今回使ったサーボ(GWSのS03T)の調子がいまいちよろしくありません。
センター値のPWM値を調べ、そのPWM値を与えても、毎回同じ角度になりません。
また、徐々(スムーズ)にPWM値を変化してゆくと、突然大きく動いたり、逆回転したりで、正確な制御が出来ません。
それで、実験は中止することとしました。
来週末に、サーボをフタバのS3003に変更することとしましょう。
S3003ではトルクは無いですが、このようなことは経験していません。
腕をパタパタ、左右体重移動の動画。
2006年4月22日(土)
New伝助3号の組立て
No.425
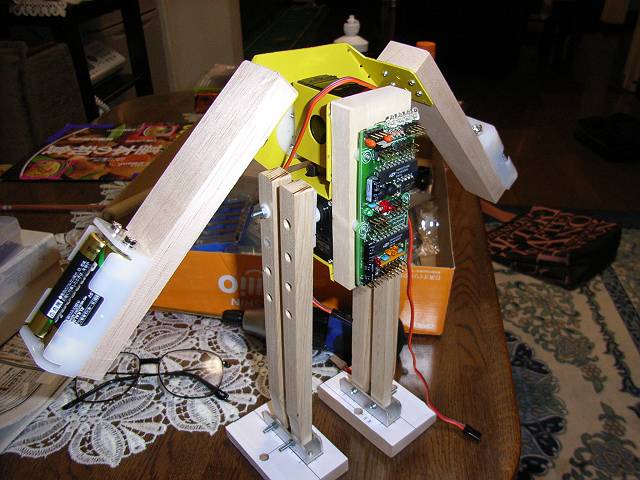
New伝助3号の組立てをしました。
体重移動は、電池BOXを錘代わりに使った腕を左右に動かすこととしました。
初期のアイデアからの変更点です。
CPUボードは、豪華に2種類使うこととしました。
基本的には、伝助8号と同じで、マスターCPUとサーボコントローラーCPUです。
ソフトをあまり変更せずに手早く実験できるようにするためです。
青色LEDを4つ付けて、足裏の4つのSWの状態をわかるようにしました。
ハードはほぼ完成したので、明日はソフトを書いてみます。
2006年4月21日(金)
工作の準備
No.424
工作の準備です。
サーボを固定するアルミフレームの図面を書きました。
体重移動は、腕をつけることにしました。
図面はAdobe Illustratorで書いています。
2006年4月18日(火)
週間マイロボット解約
No.423
週間マイロボット
の定期購読を解約しました。
やはり、私には手作り工作がにあっているようです。
試行錯誤しながら、回り道して、ちょっとわき道にそれたりしながら、のんびりやってゆこうと思います。
解約は、
このページの下
の電話番号のところに電話して、解約をお願いしたら簡単に終了しました。
2006年4月16日(日)
足の仮組み
No.422
三月兎さんからRobo-One9回大会のDVDが届いていたので、朝から見てました。
やはり動作がキビキビして、安定した走りの出来るロボットはすばらしいです。
色々と参考になります。
さて、NEW伝助3号ですが、足の工作をしました。
サーボを両面テープで仮止めして、足も仮止めして見ました。
足の長さが微妙にばらついていて、精度が出ていません。
うーん、作り直しでしょうか。
左右体重移動を容易にするために、足裏を斜めにカットしたのですが、この加工は結構上手く行きました。
もう少し角度をつけた方が良さそうです。
GWSのS03Tサーボですが、PWMへの追従がおかしいようです。
0.01ms間隔でPWMを変化させて、サーボの回転角度をチェックしたのですが、回転角度が大きく変わったり、逆転したり、動作がおかしいです。
平行リンクの足を動かして見ましたの動画。
2006年4月15日(土)
作業進まず
No.421
朝、NEW伝助3号の部品の設計をして、製作を予定していました。
足の図面をプリントして、ファルタカ材に貼りノコで切断したかったのですが、出来ませんでした。
昼前に道路の開通式があり、それに出席し、その後飲み会となって結局作業は進みませんでした。
2006年4月14日(金)
NEW伝助3号のサーボはS03T
No.420
S3003が手元に無かったので、NEW伝助3号のサーボはGWSのS03Tを使うことにしました。
価格は1,500円くらいだと思います。
スピードがちょっと遅いということですが、走らせるわけではないので我慢しましょう。
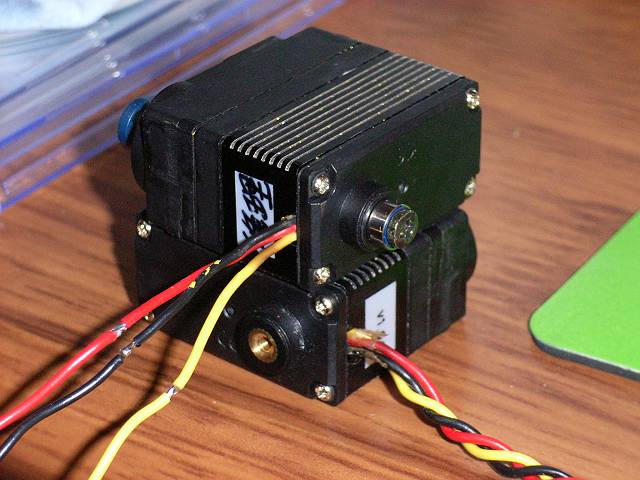
それで、反対軸の付け方を考えるために、とりあえず分解しました。
なんと、ちょうど反対軸部分のケース内側が空洞となっていて、Goodです。
早速3mmの穴を開け、反対軸用に3mmビスを取り付けました。
あと、サーボの「耳」が邪魔なので切断しました。
2006年4月13日(木)
NEW伝助3号
No.419
2003年9月頃、伝助3号を作って遊んでいました
。
AIモーターを3個使って、1個のモーターで左右に体を揺らして、左右体重移動のタイミングで、右足モーターと左足モーターを使って足を前後させる、といった簡単なものでした。
伝助8号の歩行も基本的にはこの時からあまり進化していません。 おはずかしい。
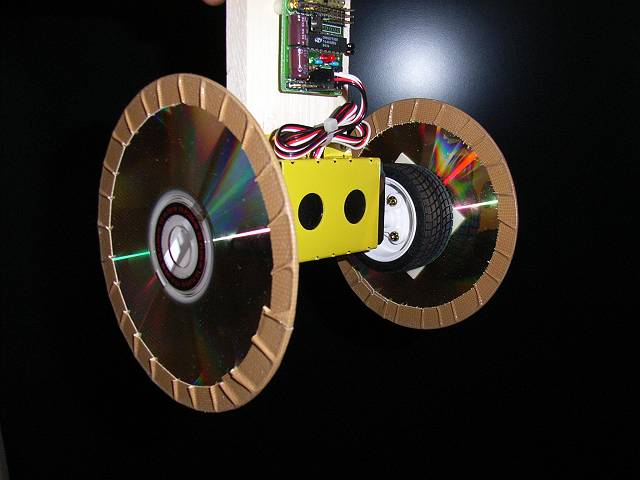
この「伝助振子歩行」を極めるため、最新テクノロジ(私の狭い範囲での話)を使った、NEW伝助3号を考えてみました。
左右の体重移動は、CDに重り付けてサーボで回転します。
ムラタセイサク君方式。
足は、平行リンクです。
足を前後に動かしたとき足裏が地面に平行になるようにします。
足裏に、センサー(SW)を付けて、体重移動したとき、片足が離れたことをセンスします。
そのタイミングで足を前後に動かします。
足が離れている時間が短いときは、少し前後し、長い時は多めに前後して、大また歩き、みたいな制御を考えています。
多分、前後には歩くと思うのですが、
今回の課題は、左右に旋回できるかです。
もし、左右旋回できれば床の上を自由に歩き回ることも夢ではありません。
S3003サーボ3個使って、材料費は5,000円くらいでしょうか。
2006年4月12日(水)
足首サーボの配置
No.418
足首サーボの配置を考えています。
足首サーボの配置まで換えるとすると、改造ではなくてほとんど新機種作った方が良いような気もします。
2006年4月11日(火)
伝助8号新サーボレイアウト案
No.417
ONOさんの不定期日記経由
で、
「ロボットの目をつくる」という本
を知りました。
発売はまだのようですが、要チェックです。
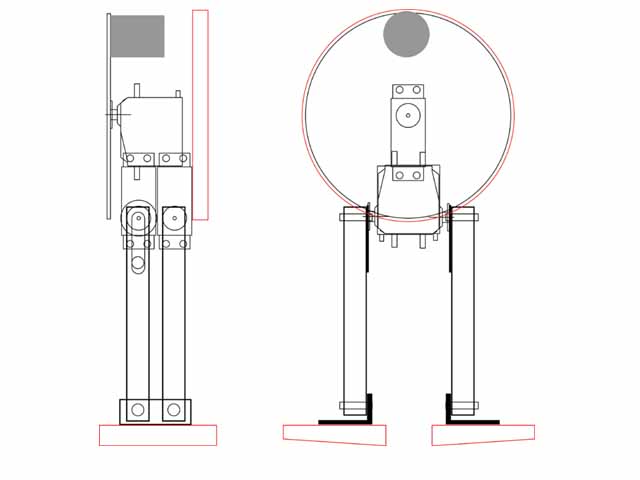
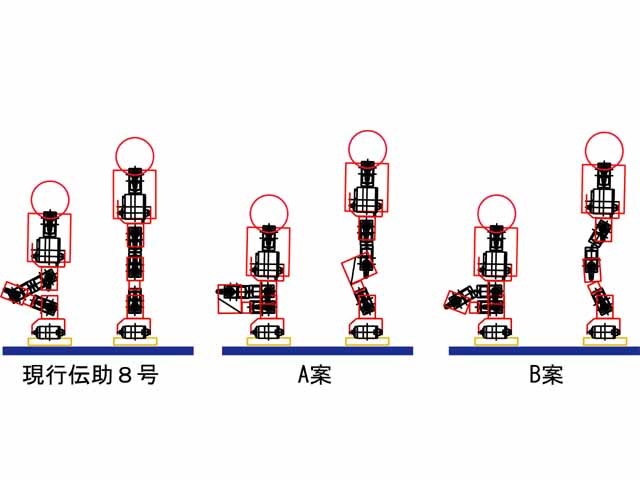
さて、伝助8号の改造計画ですが、サーボのレイアウトを変えて完全にしゃがみ込めるように計画中です。
2つの案を考えてみました。
A案は、1部現在のフレームの流用が出来きます。
B案は、足フレーム全て作り直しです。
直立したときの美しさは、B案です。
B案の直立した姿は、ダイナマイザーなど走りロボットに似ているようです。
伝助も走れることを期待して、B案を採用しましょう。
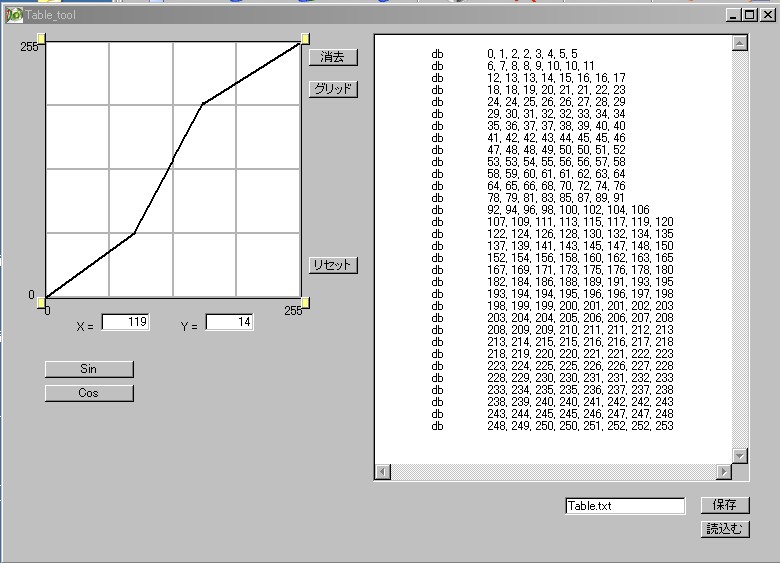
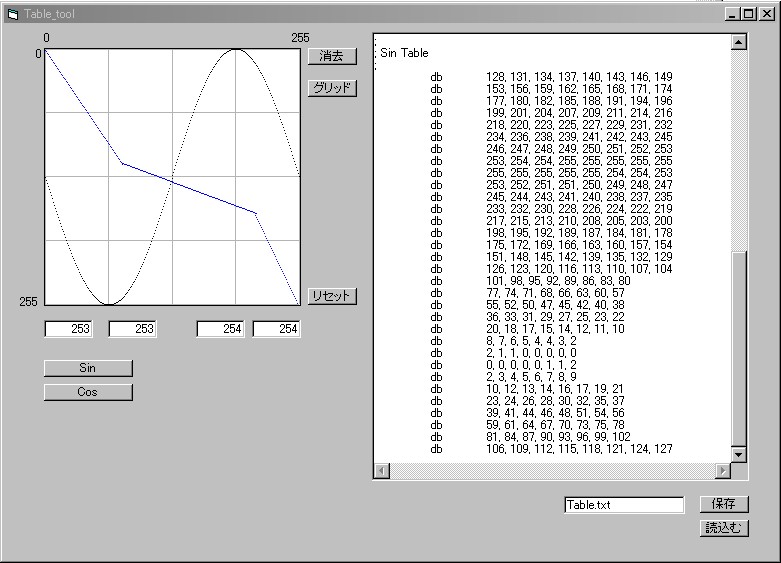
さて、Table作成Toolですが、左下を(0,0)としてみました。
プロットする点の大きさも、ちょっと大きめにして見やすくしました。
アイコンも付けて見ました。
まだ細かな修正が必要ですが、いろいろと実験するのには使えそうです。
2006年4月10日(月)
Table作成Tool
No.416
VB6でTable作成Toolを作ってみました。
まだ完成はしていませんが、前からあれば便利だと思っていたToolです。
プログラムを書いていると、Table参照でDataを変換したいことが時々あります。
特に、8bitCPUなど使って三角関数などの演算を高速で行うときTable参照で変換すれば簡単です。(精度を望まない時)
あと、関数ではあらわせない変換、たとえば人間の感覚や実験的に得たDATAを元に入出力を変換する場合、任意のカーブが必要となります。
そんな時、このソフトは適当にマウスでクリックしてカーブを作れるので便利です。
伝助のソフトはアセンブラで書いているので、アセンブラのソースファイルとしてテキストファイルで保存できるようにしました。
左上が(0,0)で、右下が(255.255)となっています。
ここら辺を直さないと、恥ずかしくて公開できません。
2006年4月9日(日)
伝助8号改造計画
No.415
突然ですが、倒立振子はひとまず中断し、2足歩行にもどってきました。
伝助9号も作りたいのですが、資金不足につき伝助8号改造計画を考えています。
1:膝を曲げてしゃがんだ時、かかととお尻がぴったりつくようにフレームを作り直す。
2:上半身が左右に回転するようにする。
3:頭部の作り直し。 Trevaを内蔵。
4:いよいよセンサーを使う。
5:リモコンの作り直し。
6:モーションエディター作り直し。
7:走り、やりたいです。
8:パラメーター歩行。
9:腕の曲げ方変更。
うーん、伝助9号作った方が効率よいかな、
2006年4月8日(土)
倒立振子、少しだけ立つ
No.414
倒立振子が少しだけ立ちました。
バンザイ、すごく嬉しいです。
床の上ではまだ不安定なのですが、カーペット上では結構自立しています。
それで、車輪にスポンジの隙間テープを貼り、床の上で動かしたら、結構倒れずに頑張っていました。
電池BOXの取り付け位置を下に下げ、重心を下げてみました。
傾斜センサーのデーターを平滑化してみました。
アルゴリズムを超簡単にしてみました。
アルゴリズムは、
1:傾斜センサーの平滑化されたデータ-をチェック。
2:前に傾いていたら、車輪を回転、前進。
3:後ろに傾いたら、車輪を回転し、後進。
この繰り返しです。
ハードはこのままでもいけそうなので、希望が持ててきました。
後は、ソフトの改良です。
床の上の不安定な自立動画。
カーペットの上の比較的安定な自立動画。
車輪に隙間テープを貼った比較的安定な自立動画。
2006年4月8日(土)
鉄のオブジェ
No.413
ボルトや釘を溶接して作ったバイクの置物を1,050円で買ってきました。
昨日浜松へ車で行った帰りに、恵那峡のサービスエリアで休憩したら、1,050円均一ショップがあって、そこにおいてありました。
カエルがバイクを運転しているようで、シンプルさに欠けています。
グラインダーでカエルの溶接部分を切り取り、バイクだけにしました。
結構すっきりして来ました。
細かな部品を綺麗に溶接しています。
どのような溶接機を使っているのか知りたいです。
取り除いたカエルは、
ペン立て
になりました。
2006年4月5日(水)
ロボワン・ワールドカップ2006
No.412
TBSの特番「ロボワン・ワールドカップ2006」を見ました。
Robo-One大会で実際に会っているロボットが出るということで、楽しみにしていました。
最終種目の「デスブリッジ」は、ロボットがかわいそうで心が痛みました。
ゴールを目指し、橋から落ちるロボット続出。
高さは5mくらい(多分)、床にはクッションがなく、落ちたロボットは大怪我。
妻も、決勝出れないロボットの方が良かったね、と言ってました。
ロボット製作者の一人として、ロボットは自分の子供みたいに大切なものです。
2006年4月4日(火)
倒立振子立たず
No.411
倒立振子立たちません。
電池Boxを上に上げて、重心を上げました。
動作がちょっと変化したようです。
サーボ改造版の車輪駆動モーターがぶるぶるします。
モーターを回転していなくても、車輪に加重がかかるとブルブル振るえて、結果、傾斜センサーが震えて動作が不安定になるようです。
駆動系の変更も検討してみます。
2006年4月3日(月)
倒立振子のタイヤを大きく
No.410
倒立振子で検索したら、31,600件ヒットしました。
大学などの研究論文が多いようです。
倒立振子を立てるのは奥が深そうです。
私の場合、理論ではなく、直感でやっているので、なかなか立ちません。
それで、もし、倒立振子が立ったとしたら、すごい達成感が得られると思います。
がんばりましょう。
複数の人からメールでアドバイスいただきました。
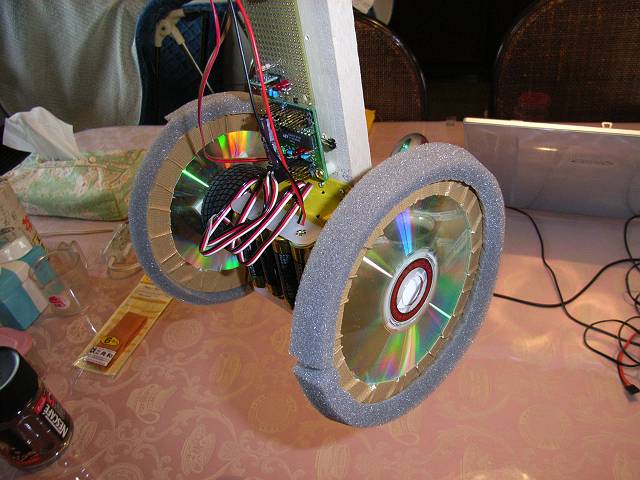
車輪を大きくしたら、ということで、大きくしてみました。
CD-Rに滑り止め用のガムテープを巻き、オリジナルのタイヤの両面テープで貼り付けました。
傾いたとき補正するための、移動スピードが上がり、前よりもいい感じです。
でも、まだ立つことは出来ません。
次は電池BOXの取り付け位置を上げて、重心を上げてみようかと思います。
気になるところはまだまだたくさんあります。
2006年4月2日(日)
なかなか立たない倒立振子
No.409
倒立振子を立てるのは難しいです。
バランスポイントでブルブル振動して、この振動がセンサーに伝わって正確な傾斜情報が読み取れなくなっているようです。
サーボ(車輪)の回転スピードも遅いような感じです。
自立で立てない今日の倒立振子の動画
2006年4月2日(日)
DO2里帰り
No.408
DO2が帰ってきました。
Robo-Oneの実践で使っていただいた、ダイナマイザーの杉浦さんと、レトロの裕太さんのDO2が調子がおかしいということで、我が家に里帰りです。
デバッガーつないでファームを再ロードしたら直りました。
私の伝助8号は、仕事の都合で第9回Robo-Oneに参加できませんでしたが、DO2搭載のロボットがRobo-Oneで活躍されたことは、私にとっても嬉しいことです。
DO2の新しいシールを貼って、ご主人様の元へ再び旅立ちました。
2006年4月2日(日)
デジタルマルチテスター
No.407
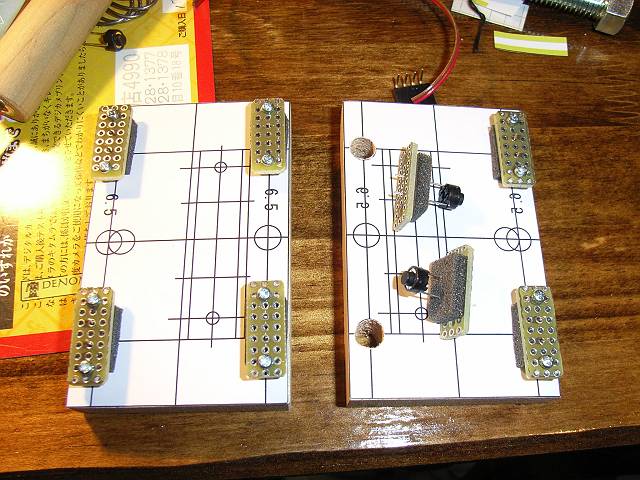
導電スポンジの抵抗値を計ろうと思い、デジタルマルチテスターを買ってあったのを思い出し、早速使ってみました。
1月にアメリカに行った時、友人に進められて買ったものです。
FLUKE
風のデザインで、なかなかのものです。
$39.99でした。
コンデンサーの容量とか、周波数も測れます。
コンデンサーの容量を計れるテスター使うの初めてなので、1μFのコンデンサーをチェックしてみました。
それなりの値が出て、一安心です。
さて、導電スポンジの抵抗値は、50kΩ位でした。
ただし、テスター棒の接触面積などによって大きく変化しますが、
2006年4月1日(土)
倒立振子ハード完成
No.406
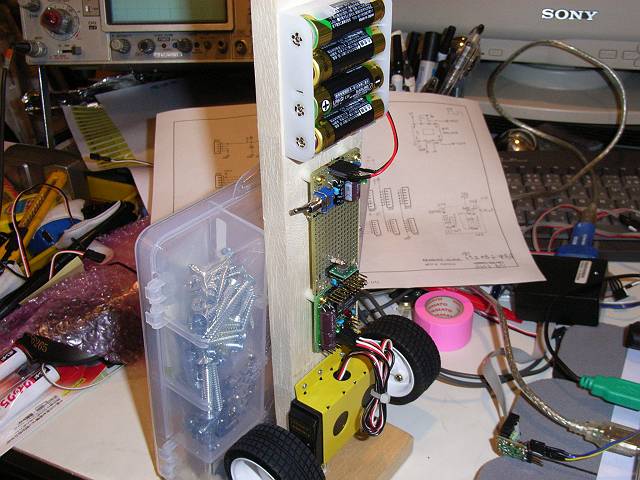
倒立振子ハードを作りました。
この前秋葉原で買ってきた単三電池ボックスも取り付けて、一応自立型にしました。
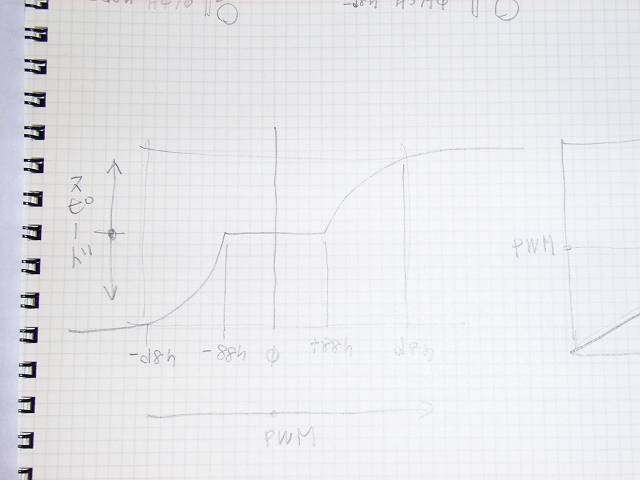
さて、サーボの基礎データ-を取って見ました。
PWMでサーボの回転が制御できるのですが、サーボが回転しない不感帯の幅が結構あることがわかりました。
ここら辺を解決しないと、細かなフィードバックがかからないと思います。
それと、車輪の回転スピードが遅いような気がします。
ここら辺も、ちゃんと実験してみないとわからないことです。
No.
PASS
OR
AND
スペースで区切って複数指定可能
++HOME++
[日記一覧]
[最新]
shiromuku(fs2)DIARY
version 3.00