Robo-One戦士の皆様お疲れ様でした。
私はすっかり浦島太郎状態です。
やっと本業が一段落着いて、ONOさんのページ経由で、皆様のRobo-Oneの報告を見させていただいています。
正直、伝助もリングに立ちたかったです。
(予選は通過できなかったと思いますが)
次回、10回大会は出場できるようになりたいです。
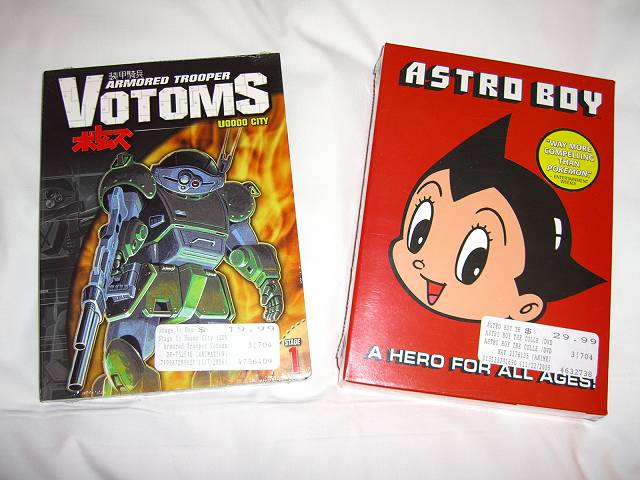
話は変わって、仕事が終わってホテルに帰る途中「Fry's」(大型電気雑貨店)と言うお店に寄って各種Cat5ケーブルを調達してたら、すごいDVDを見つけました。
ASTRO BOYの4枚セット($29.99)と、VOTOMS2枚セット($19.99)です。
VOTOMSのDVDがこんなところにおいてあるとは以外でした。
日本でも探しきれずにいたので、とてもうれしいです。
ホテルに戻ってからNOTEPCでVOTOMSDVDを観て見たら、なんと音声日本語、字幕英語でした。
2重の喜びです。
明日帰国、飛行機の中ででも見ましょうか。
|
|
|