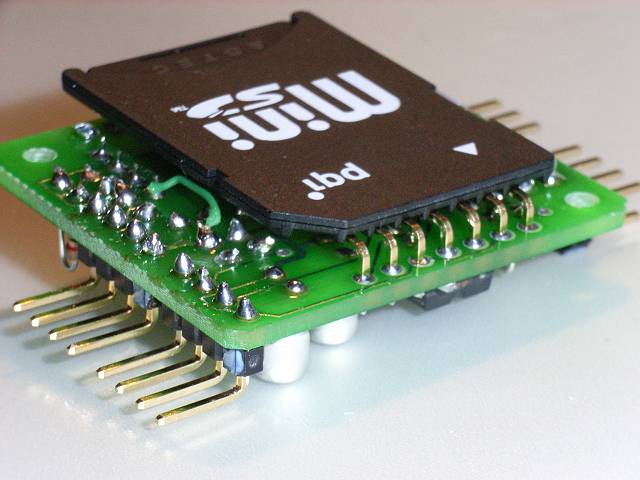
伝助音声ユニット2を組立てました。
色々トラブルがありましたが、1発で動いてました。
S/Nは、実験ボードよりも良くなっていましたが、完璧ではありません。
ロボットに実装するのには実用範囲だと思います。
もう少しソフトの手直しが必要ですが、ハードが完成したので大きな山は越えた感じです。
トラブル
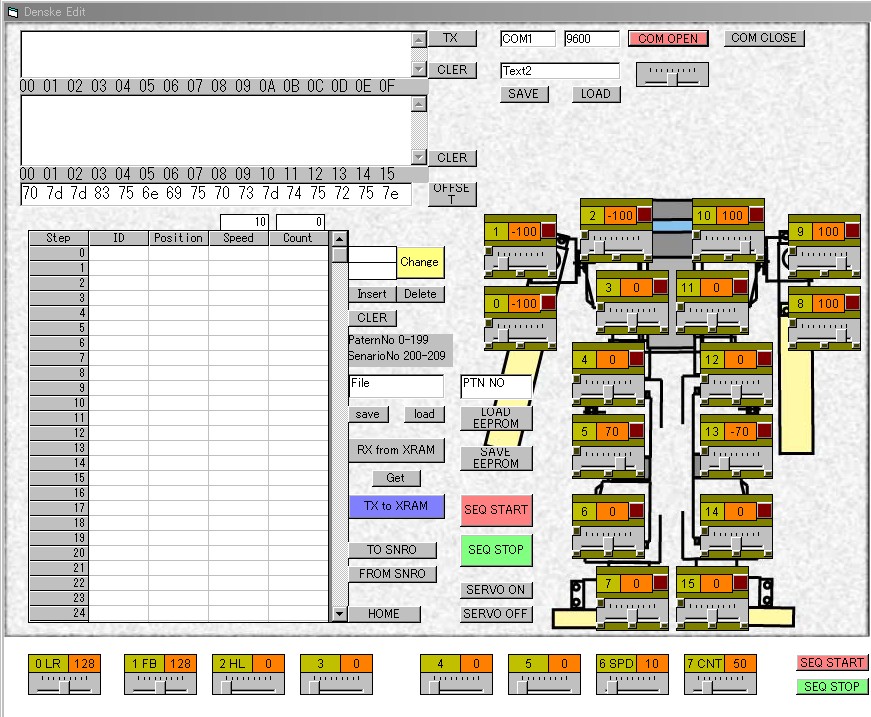
・音が出ないぞ、ということで、オシロで信号線をチェック、アンプ手前までOK。 30分くらい悩む。 スピーカーをLINEOUT端子へつないでました。
・220uFのケミコンのスペースギリギリではまらない。 穴の空けなおし。
・10uFのケミコンの穴間隔はもう少し狭くした方が良い。
・三端子レギュレータの高さが高い。
・半固定の穴位置間違い。 現物でチェックしなかった。
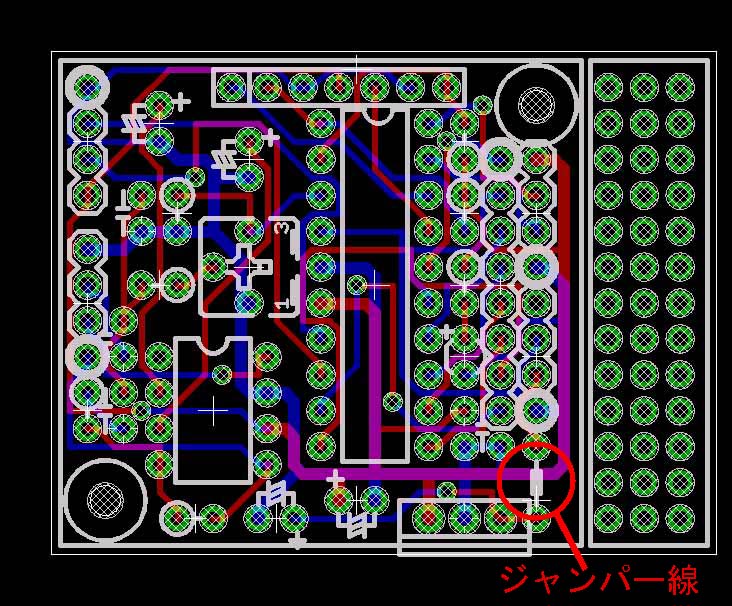
・ピンヘッダー用の穴径が1個だけ小さかった。
|
|
|