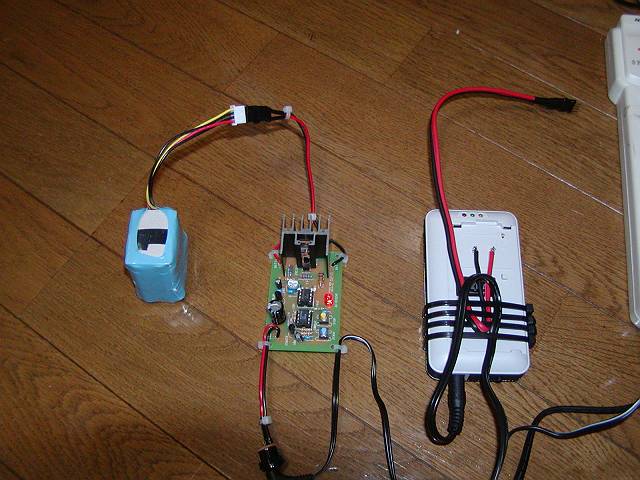
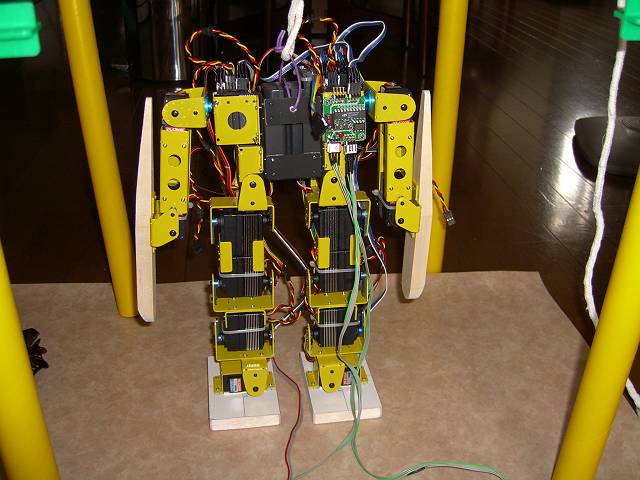
電源ボードを作りました。
実験用電源は、アルインコのロボット標準電源を使うことにしました。
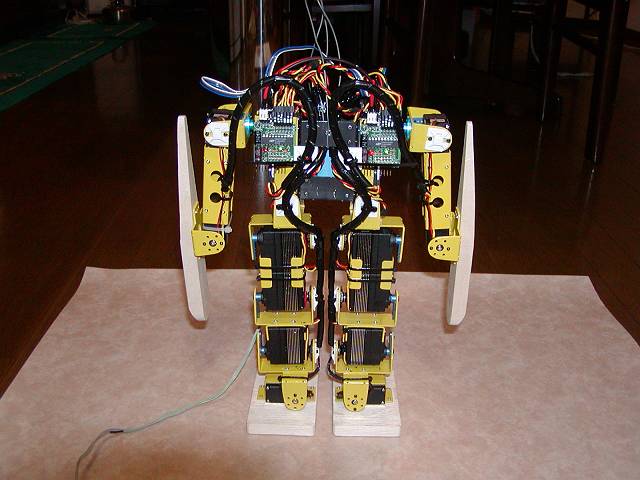
とりあえず、動作はOKです。
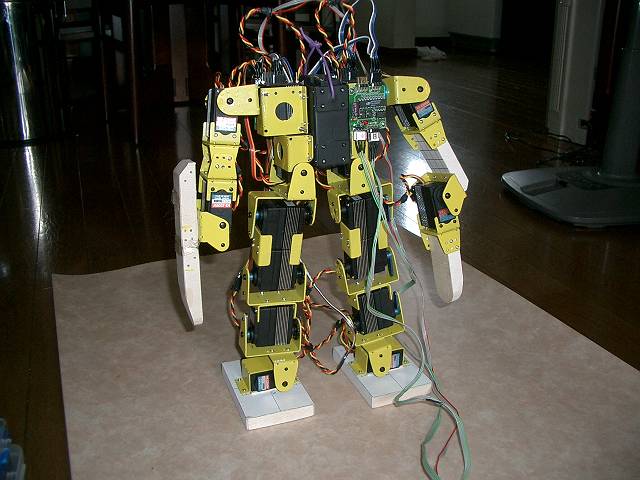
サーボに負荷をかけると、4Aくらいまで電流が増します。
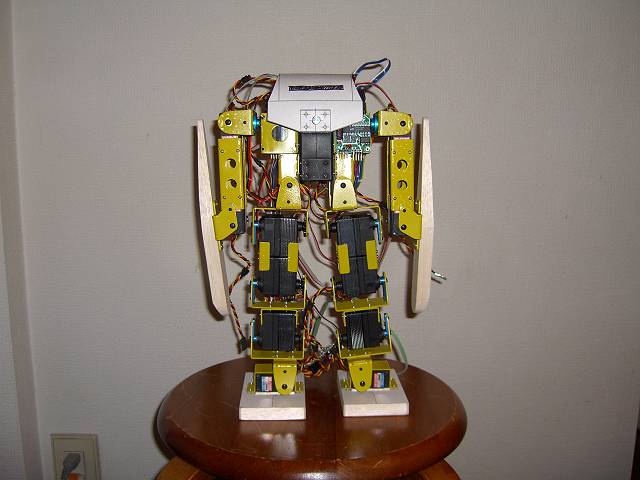
次に、ビデオカメラ用のリチウムイオン(7.2V 2700mAh)バッテリーをつないで、伝助8号の電源ON、・・・・
電源が入りません。
リチウムイオン電池の性質は、事前に調べていたのであまり驚きはしませんでした。
やはり、だめだったか、と納得してしまいました。
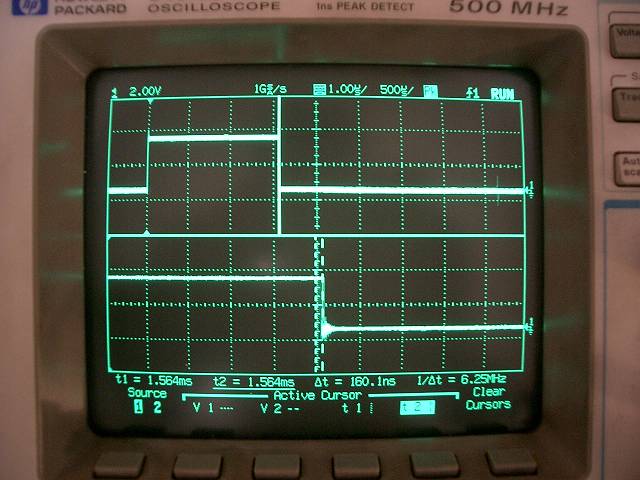
電源投入時に、サーボが同時にONしたため、ラッシュカレントが5Aをオーバーしたため、リチウムイオン電池の電流制限回路が働いたようです。
この状態になると、充電器にセットして電池の電流制限回路をリセットする必要があります。 電池はこれで生き返ります。
今回使うサーボは、PWMゼロでも脱力が出来ない(メーカーに問い合わせて確認)ので、さてどうしたものか。
電源投入時に、時間差で順番にサーボをONできれば良いのですが。
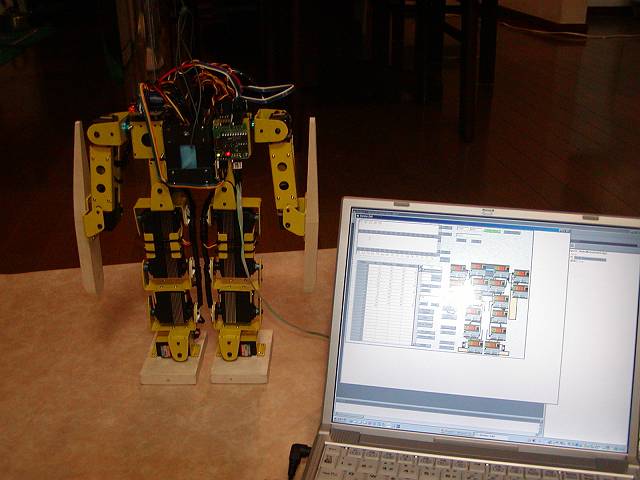
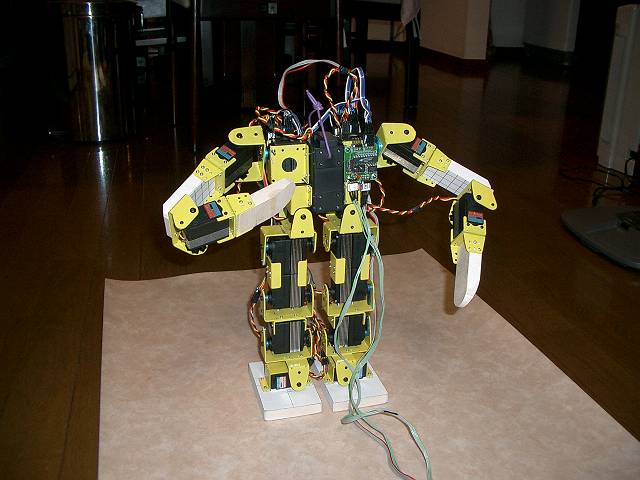
とりあえず、PWMゼロで電源ON、・・・・
オー、電源がリセットしない。
サーボの脱力はできないが、PWMゼロだとラッシュカレントが少なそうです。
電源ON時に、時間差で順番にPWMをONしていって、上手く行くかです。
本日時間切れ、実験は、後日。
上手く行けばよいのですが。
もし、だめなら、ニカド電池を使うかです。
|


|
|