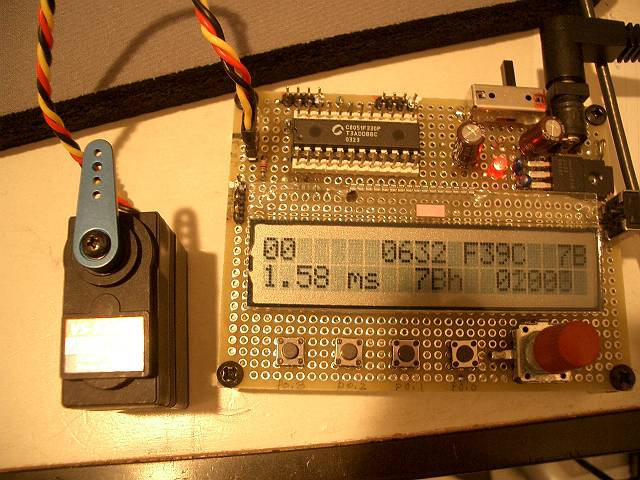
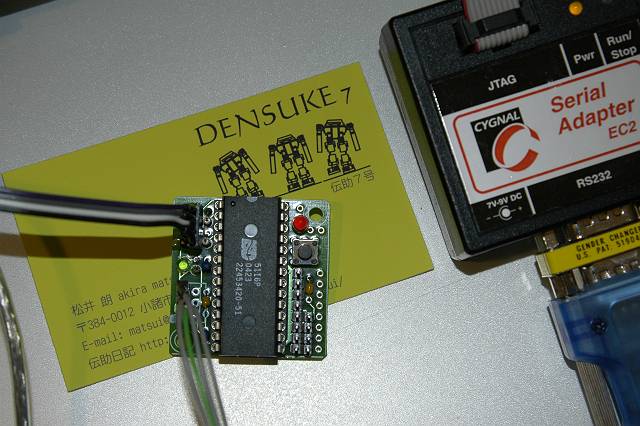
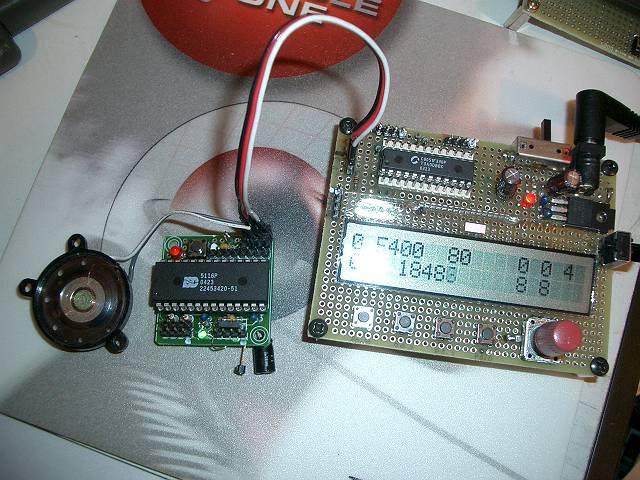
伝助音声ボードのPWM制御の実験を行いました。
PWMの測定は、今回はC8051のPCAを使うことにしました。
PWMの立上がり/立下りエッジで割り込みをかけ、立上がりでカウンターをクリアー、立下りでカウンターをキャプチャーします。
カウンター生データ−は、1msで07E1h, 2msで0FB2hでした。
これを、1ms=0, 2ms=7Fに変換します。
これをQに積み、同じデータ−が8個連続で来たら、メッセージの再生をスタートします。
これは、PWMのジッタなどによるゴミ取りにも役立ちます。
メッセージ再生のディレーは全く感じません。
再生したメッセージは、そのメッセージの最後まで行くと自動的に停まります。
新しいメッセージの再生は、新しいPWMに変更するとスタートします。
今回の制御方法の長所は、
1: 今使っているモーションエディターで、そのまま制御、プログラムできる。
2: 接続は、サーボモーターと同じ、グランド/電源/PWMの3本の線でOK。
3: PWMの範囲は1ms〜2msで約100のメッセージを制御可能。
4: メッセージは、最大8分までOK。
欠点としては、
1: 同じメッセ−ジの連続再生は、一度ダミーの無音声を経由。
2: メッセージの再現性を確保するため、録音/再生に同じサーボコントローラを使う必要がある。
PWM制御によるメッセージ再生の動画
<私的メモ>
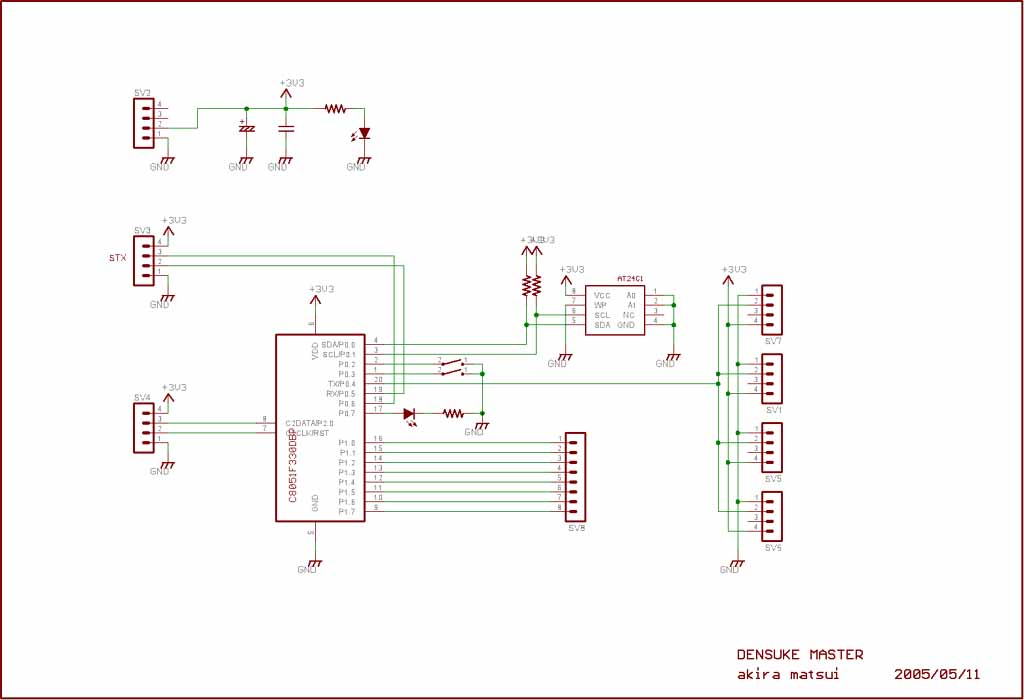
■PCAレジスター
;INIT PCA
MOV PCA0CN, #01000000B ;bit6=1 PCA Counter/Timer enable
MOV PCA0CPM0, #00110001B ;bit0=1 enable CCF INT これ重要、割り込み用
■バグ
;=================================
; 16bit 左シフト
; LSBに0、MSBのはみ出たのは切り捨て
;=================================
; RL16
; XHXL = XH,XLをYL回左シフト
RL16:
MOV A, XL
CLR C
RLC A
MOV XL,A
MOV A,XH
RLC A ;<--ここバグっていた(RRC A)おいおい
MOV XH, A
DJNZ YL,RL16
RET
■クロスバーの使い方。
任意のポートへのアサインは、使用していないポートをスキップして、目的のポートのプライオリティーを上げる。
|
|
|