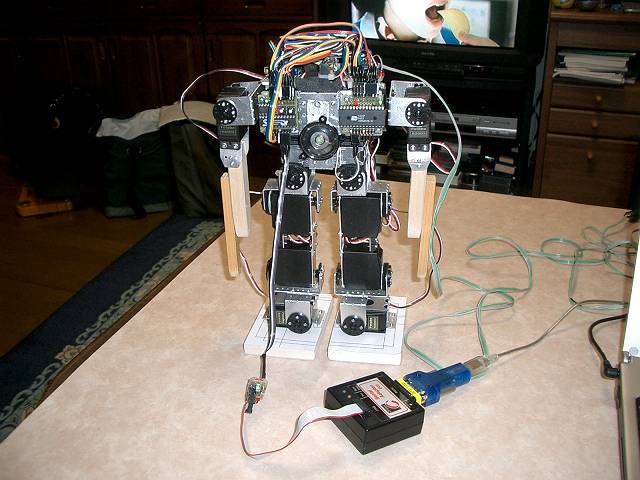
伝助コントローラーの製作の続きです。
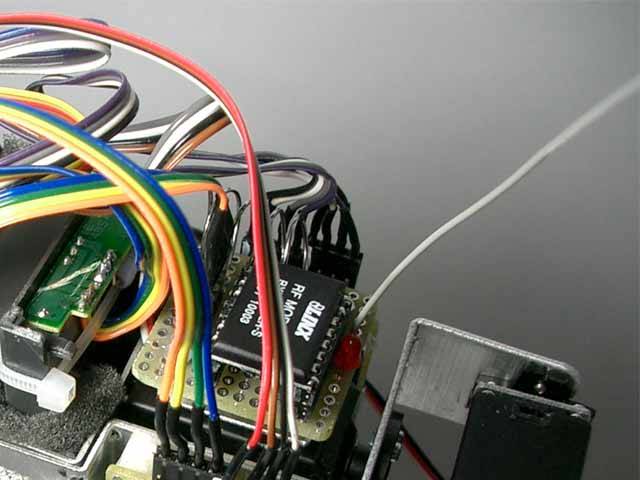
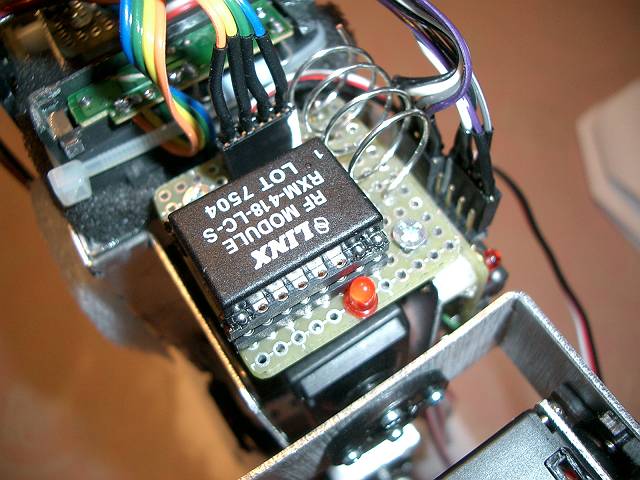
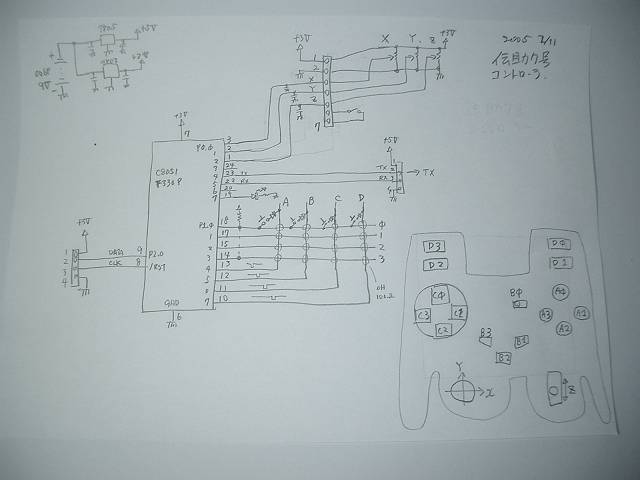
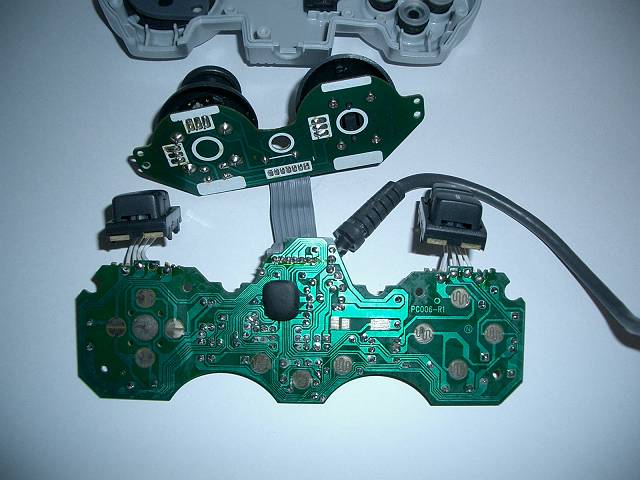
今日はハードウェアを作りました。 SWマトリックスには全てダイオードを入れて、複数SW押しOKとしました。 それで、この配線が大変でした。 朝から初めて、昼までかかりました。 昼過ぎちょっと所要で外出したので、帰ってきてから、ADの部分の配線と、その他もろもろをやって、ハードは一応完成です。
電源は、3V(単3アルカリ2本)で行くこととしました。 初めは、3Vと5V電源を作るために、006P(9V)を使うことにしていましたが、無線モジュールが3VでOKだったので、3V単一電源ですみました。 これで、電池直結で、電源回路がシンプルになりました。
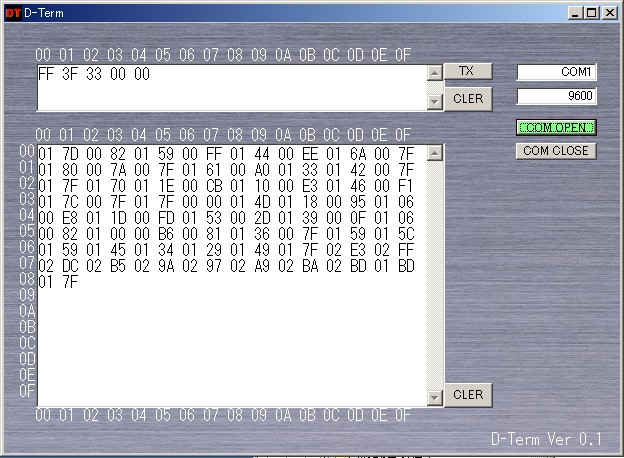
さて、ハードのチェックをかねて、テスト用ソフトを書きました。 SW読み込みは、SWの番号が逆になっていました(配線を間違えたようです)が、ソフトで修正できるので、このままでOKとしました。 心配していたチャタリングは、ほとんど皆無でした。
さて、VR(ADコンバーター)の読み込みテストですが、案の定はまってしまいました。 VRのデータ―(00h−FFh)を正常に読むのに、2時間もかかってしまいました。 気が付いてみれば、簡単なことでした。 V−REFの設定をしていませんでした。 なせけない。
ということで、XYジョイスティック、レバーの3つのアナログ値と16個のSWを読むことが出来ました。 次は、SWに対応したモーションパターNoのシリアル出力です。
本日の教訓:
;VREFを内部VDDにする
MOV REF0CN, #00001000B
;(-)入力をGNDに固定する
MOV AMX0N, #00010001B
|


|
|